正在加载图片...
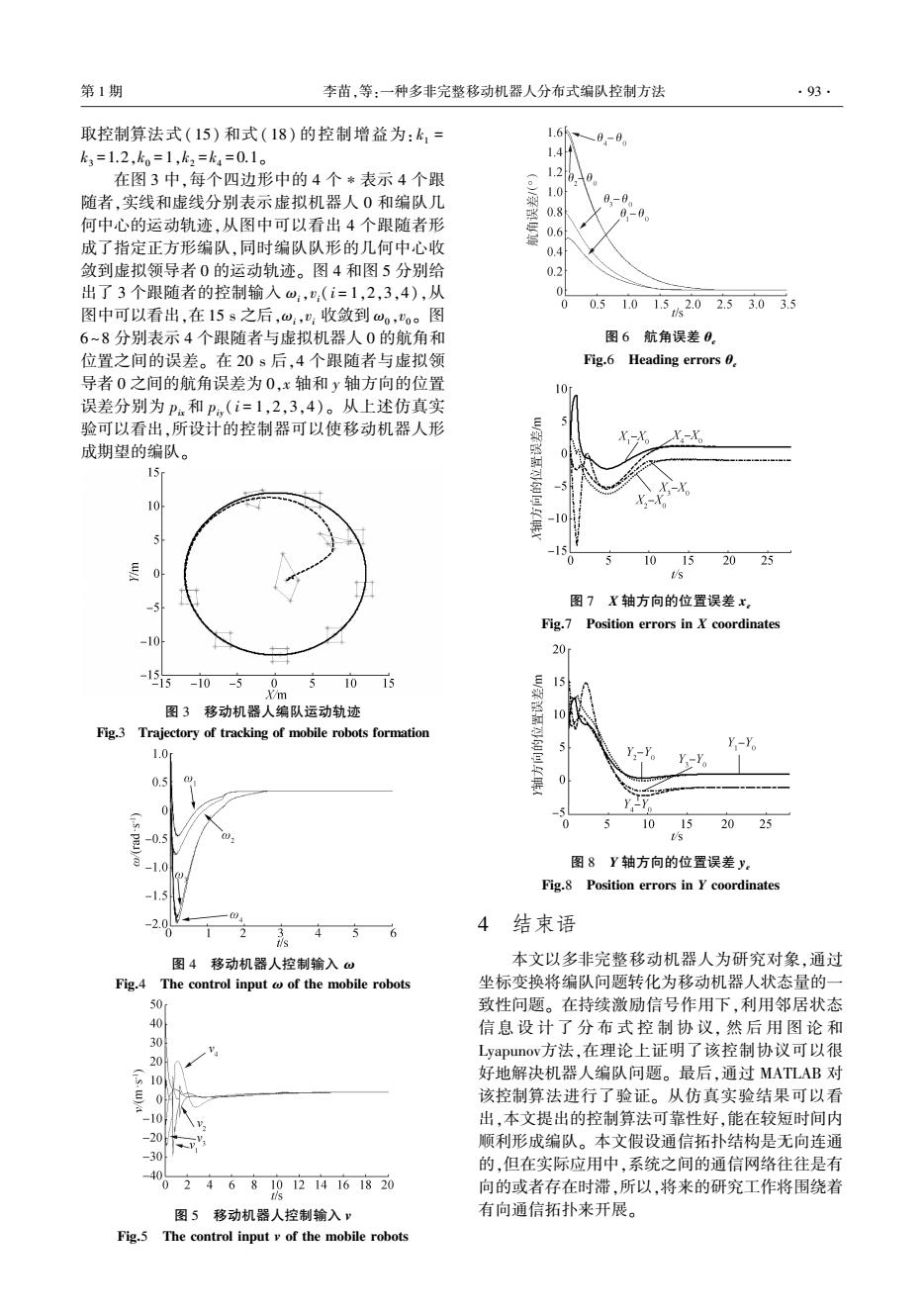
第1期 李苗,等:一种多非完整移动机器人分布式编队控制方法 93 取控制算法式(15)和式(18)的控制增益为:k,= 1.6 k3=1.2,ko=1,k2=k4=0.1。 1.4H 在图3中,每个四边形中的4个*表示4个跟 1.2 .40 1.0 随者,实线和虚线分别表示虚拟机器人0和编队几 0.8 0 何中心的运动轨迹,从图中可以看出4个跟随者形 成了指定正方形编队,同时编队队形的几何中心收 0.4 敛到虚拟领导者0的运动轨迹。图4和图5分别给 0.2 出了3个跟随者的控制输入w,,(i=1,2,3,4),从 o 图中可以看出,在15s之后,ω,:收敛到0o,o。图 0.51.01.5k2.025303.5 6~8分别表示4个跟随者与虚拟机器人0的航角和 图6航角误差0。 位置之间的误差。在20s后,4个跟随者与虚拟领 Fig.6 Heading errors 0 导者0之间的航角误差为0,x轴和y轴方向的位置 误差分别为P.和p,(i=1,2,3,4)。从上述仿真实 验可以看出,所设计的控制器可以使移动机器人形 Y-X 成期望的编队。 0 10 10月 15 10152025 US 图7X轴方向的位置误差x, Fig.7 Position errors in X coordinates -10 20 51015 15 /1m 图3移动机器人编队运动轨迹 10 Fig.3 Trajectory of tracking of mobile robots formation Y-Yo 1.0r Y,-Y Y-Y 0 10152025 图8Y轴方向的位置误差y Fig.8 Position errors in Y coordinates 12 s 46 4结束语 图4移动机器人控制输入) 本文以多非完整移动机器人为研究对象,通过 Fig.4 The control input of the mobile robots 坐标变换将编队问题转化为移动机器人状态量的一 50 致性问题。在持续激励信号作用下,利用邻居状态 信息设计了分布式控制协议,然后用图论和 30 Lyapunov方法,在理论上证明了该控制协议可以很 20 10 好地解决机器人编队问题。最后,通过MATLAB对 该控制算法进行了验证。从仿真实验结果可以看 -10 出,本文提出的控制算法可靠性好,能在较短时间内 -20 顺利形成编队。本文假设通信拓扑结构是无向连通 -30 的,但在实际应用中,系统之间的通信网络往往是有 -4 02468101214161820 s 向的或者存在时滞,所以,将来的研究工作将围绕着 图5移动机器人控制输入 有向通信拓扑来开展。 Fig.5 The control input v of the mobile robots取控制算法式( 15) 和式( 18) 的控制增益为:k1 = k3 =1.2,k0 = 1,k2 = k4 = 0.1。 在图 3 中,每个四边形中的 4 个∗表示 4 个跟 随者,实线和虚线分别表示虚拟机器人 0 和编队几 何中心的运动轨迹,从图中可以看出 4 个跟随者形 成了指定正方形编队,同时编队队形的几何中心收 敛到虚拟领导者 0 的运动轨迹。 图 4 和图 5 分别给 出了 3 个跟随者的控制输入 ωi,vi(i = 1,2,3,4),从 图中可以看出,在 15 s 之后,ωi,vi 收敛到 ω0 ,v0 。 图 6~8 分别表示 4 个跟随者与虚拟机器人 0 的航角和 位置之间的误差。 在 20 s 后,4 个跟随者与虚拟领 导者 0 之间的航角误差为 0,x 轴和 y 轴方向的位置 误差分别为 pix和 piy( i = 1,2,3,4)。 从上述仿真实 验可以看出,所设计的控制器可以使移动机器人形 成期望的编队。 图 3 移动机器人编队运动轨迹 Fig.3 Trajectory of tracking of mobile robots formation 图 4 移动机器人控制输入 ω Fig.4 The control input ω of the mobile robots 图 5 移动机器人控制输入 v Fig.5 The control input v of the mobile robots 图 6 航角误差 θe Fig.6 Heading errors θe 图 7 X 轴方向的位置误差 xe Fig.7 Position errors in X coordinates 图 8 Y 轴方向的位置误差 ye Fig.8 Position errors in Y coordinates 4 结束语 本文以多非完整移动机器人为研究对象,通过 坐标变换将编队问题转化为移动机器人状态量的一 致性问题。 在持续激励信号作用下,利用邻居状态 信息 设 计 了 分 布 式 控 制 协 议, 然 后 用 图 论 和 Lyapunov方法,在理论上证明了该控制协议可以很 好地解决机器人编队问题。 最后,通过 MATLAB 对 该控制算法进行了验证。 从仿真实验结果可以看 出,本文提出的控制算法可靠性好,能在较短时间内 顺利形成编队。 本文假设通信拓扑结构是无向连通 的,但在实际应用中,系统之间的通信网络往往是有 向的或者存在时滞,所以,将来的研究工作将围绕着 有向通信拓扑来开展。 第 1 期 李苗,等:一种多非完整移动机器人分布式编队控制方法 ·93·