正在加载图片...
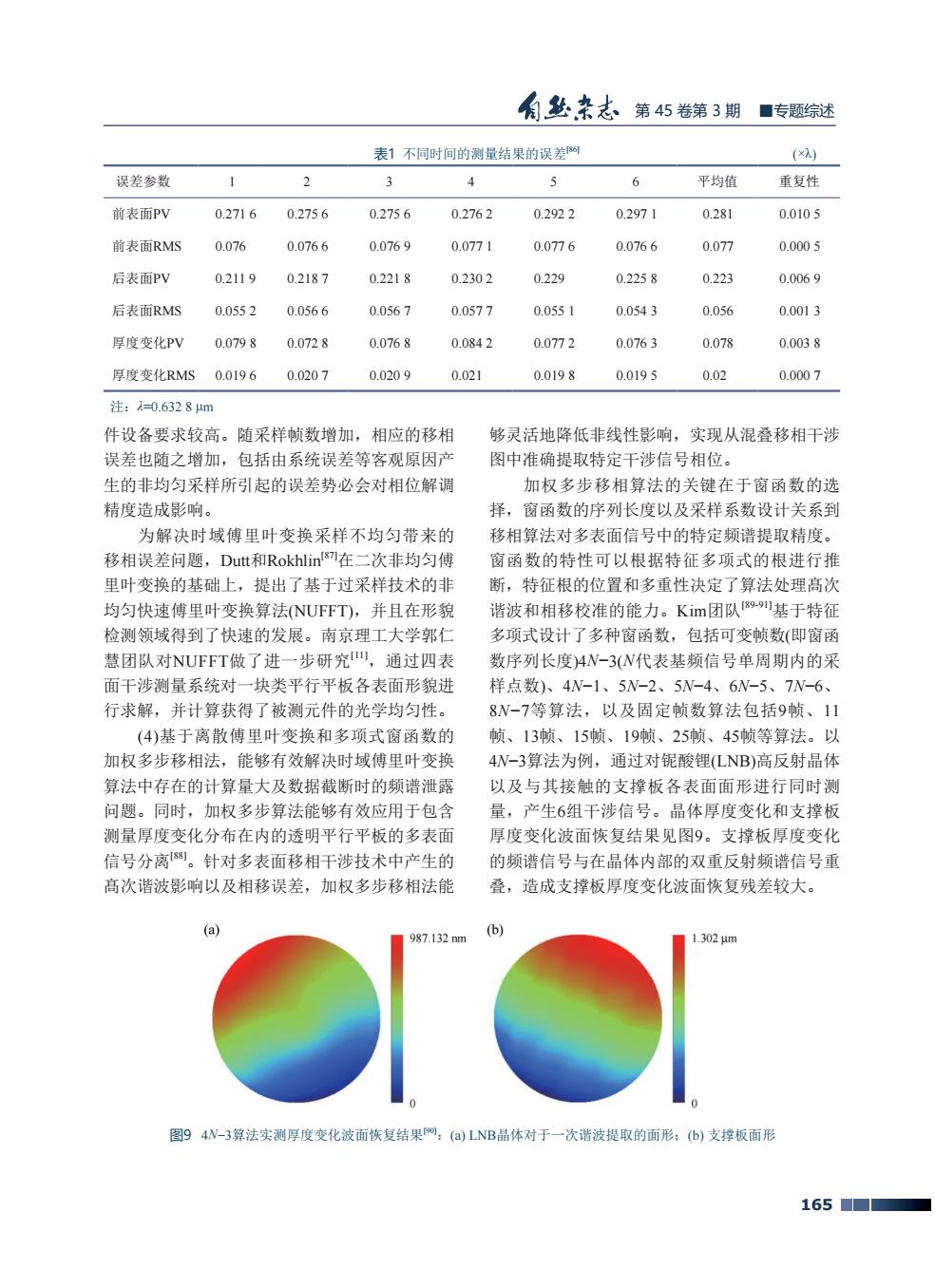
角数老志第45卷第3期 ■专题综述 表1不同时间的测量结果的误差胸 (×1) 误差参数 2 4 5 6 平均值 重复性 前表面PV 0.2716 0.2756 0.2756 0.2762 0.2922 0.2971 0.281 0.0105 前表面RMS 0.076 0.0766 0.0769 0.0771 0.0776 0.0766 0.077 0.0005 后表面PV 0.2119 0.2187 0.2218 0.2302 0.229 0.2258 0.223 0.0069 后表面RMS 0.0552 0.0566 0.0567 0.0577 0.0551 0.0543 0.056 0.0013 厚度变化PV 0.0798 0.0728 0.0768 0.0842 0.0772 0.0763 0.078 0.0038 厚度变化RMS 0.0196 0.0207 0.0209 0.021 0.0198 0.0195 0.02 0.0007 注:1=0.6328μm 件设备要求较高。随采样帧数增加,相应的移相 够灵活地降低非线性影响,实现从混叠移相干涉 误差也随之增加,包括由系统误差等客观原因产 图中准确提取特定干涉信号相位。 生的非均匀采样所引起的误差势必会对相位解调 加权多步移相算法的关键在于窗函数的选 精度造成影响。 择,窗函数的序列长度以及采样系数设计关系到 为解决时域傅里叶变换采样不均匀带来的 移相算法对多表面信号中的特定频谱提取精度。 移相误差问题,Dut和Rokhlint87在二次非均匀傅 窗函数的特性可以根据特征多项式的根进行推 里叶变换的基础上,提出了基于过采样技术的非 断,特征根的位置和多重性决定了算法处理高次 均匀快速傅里叶变换算法(NUFFT),并且在形貌 谐波和相移校准的能力。Kim团队9.91基于特征 检测领域得到了快速的发展。南京理工大学郭仁 多项式设计了多种窗函数,包括可变帧数(即窗函 慧团队对NUFFT做了进一步研究,通过四表 数序列长度)4N-3(N代表基频信号单周期内的采 面干涉测量系统对一块类平行平板各表面形貌进 样点数)、4N-1、5N-2、5N-4、6N-5、7N-6、 行求解,并计算获得了被测元件的光学均匀性。 8N-7等算法,以及固定帧数算法包括9帧、11 (4)基于离散傅里叶变换和多项式窗函数的 帧、13帧、15帧、19帧、25帧、45帧等算法。以 加权多步移相法,能够有效解决时域傅里叶变换 4N-3算法为例,通过对铌酸锂LNB)高反射晶体 算法中存在的计算量大及数据截断时的频谱泄露 以及与其接触的支撑板各表面面形进行同时测 问题。同时,加权多步算法能够有效应用于包含 量,产生6组干涉信号。晶体厚度变化和支撑板 测量厚度变化分布在内的透明平行平板的多表面 厚度变化波面恢复结果见图9。支撑板厚度变化 信号分离。针对多表面移相干涉技术中产生的 的频谱信号与在晶体内部的双重反射频谱信号重 高次谐波影响以及相移误差,加权多步移相法能 叠,造成支撑板厚度变化波面恢复残差较大。 (a) 987.132m 6) 1.3021m 图94W-3算法实测厚度变化波面恢复结果四:(a)LNB晶体对于一次谐波提取的面形:(b)支撑板面形 165165 Chinese Journal of Nature Vol. 45 No. 3 REVIEW ARTICLE 第 45 卷第 3 期 ■专题综述 件设备要求较高。随采样帧数增加,相应的移相 误差也随之增加,包括由系统误差等客观原因产 生的非均匀采样所引起的误差势必会对相位解调 精度造成影响。 为解决时域傅里叶变换采样不均匀带来的 移相误差问题,Dutt和Rokhlin[87]在二次非均匀傅 里叶变换的基础上,提出了基于过采样技术的非 均匀快速傅里叶变换算法(NUFFT),并且在形貌 检测领域得到了快速的发展。南京理工大学郭仁 慧团队对NUFFT做了进一步研究[11],通过四表 面干涉测量系统对一块类平行平板各表面形貌进 行求解,并计算获得了被测元件的光学均匀性。 (4)基于离散傅里叶变换和多项式窗函数的 加权多步移相法,能够有效解决时域傅里叶变换 算法中存在的计算量大及数据截断时的频谱泄露 问题。同时,加权多步算法能够有效应用于包含 测量厚度变化分布在内的透明平行平板的多表面 信号分离[88]。针对多表面移相干涉技术中产生的 髙次谐波影响以及相移误差,加权多步移相法能 够灵活地降低非线性影响,实现从混叠移相干涉 图中准确提取特定干涉信号相位。 加权多步移相算法的关键在于窗函数的选 择,窗函数的序列长度以及采样系数设计关系到 移相算法对多表面信号中的特定频谱提取精度。 窗函数的特性可以根据特征多项式的根进行推 断,特征根的位置和多重性决定了算法处理髙次 谐波和相移校准的能力。Kim团队[89-91]基于特征 多项式设计了多种窗函数,包括可变帧数(即窗函 数序列长度)4N−3(N代表基频信号单周期内的采 样点数)、4N−1、5N−2、5N−4、6N−5、7N−6、 8N−7等算法,以及固定帧数算法包括9帧、11 帧、13帧、15帧、19帧、25帧、45帧等算法。以 4N−3算法为例,通过对铌酸锂(LNB)高反射晶体 以及与其接触的支撑板各表面面形进行同时测 量,产生6组干涉信号。晶体厚度变化和支撑板 厚度变化波面恢复结果见图9。支撑板厚度变化 的频谱信号与在晶体内部的双重反射频谱信号重 叠,造成支撑板厚度变化波面恢复残差较大。 表1 不同时间的测量结果的误差[86] (×λ) 误差参数 1 2 3 4 5 6 平均值 重复性 前表面PV 0.271 6 0.275 6 0.275 6 0.276 2 0.292 2 0.297 1 0.281 0.010 5 前表面RMS 0.076 0.076 6 0.076 9 0.077 1 0.077 6 0.076 6 0.077 0.000 5 后表面PV 0.211 9 0.218 7 0.221 8 0.230 2 0.229 0.225 8 0.223 0.006 9 后表面RMS 0.055 2 0.056 6 0.056 7 0.057 7 0.055 1 0.054 3 0.056 0.001 3 厚度变化PV 0.079 8 0.072 8 0.076 8 0.084 2 0.077 2 0.076 3 0.078 0.003 8 厚度变化RMS 0.019 6 0.020 7 0.020 9 0.021 0.019 8 0.019 5 0.02 0.000 7 图9 4N-3算法实测厚度变化波面恢复结果[90]:(a) LNB晶体对于一次谐波提取的面形;(b) 支撑板面形 注:λ=0.632 8 μm