正在加载图片...
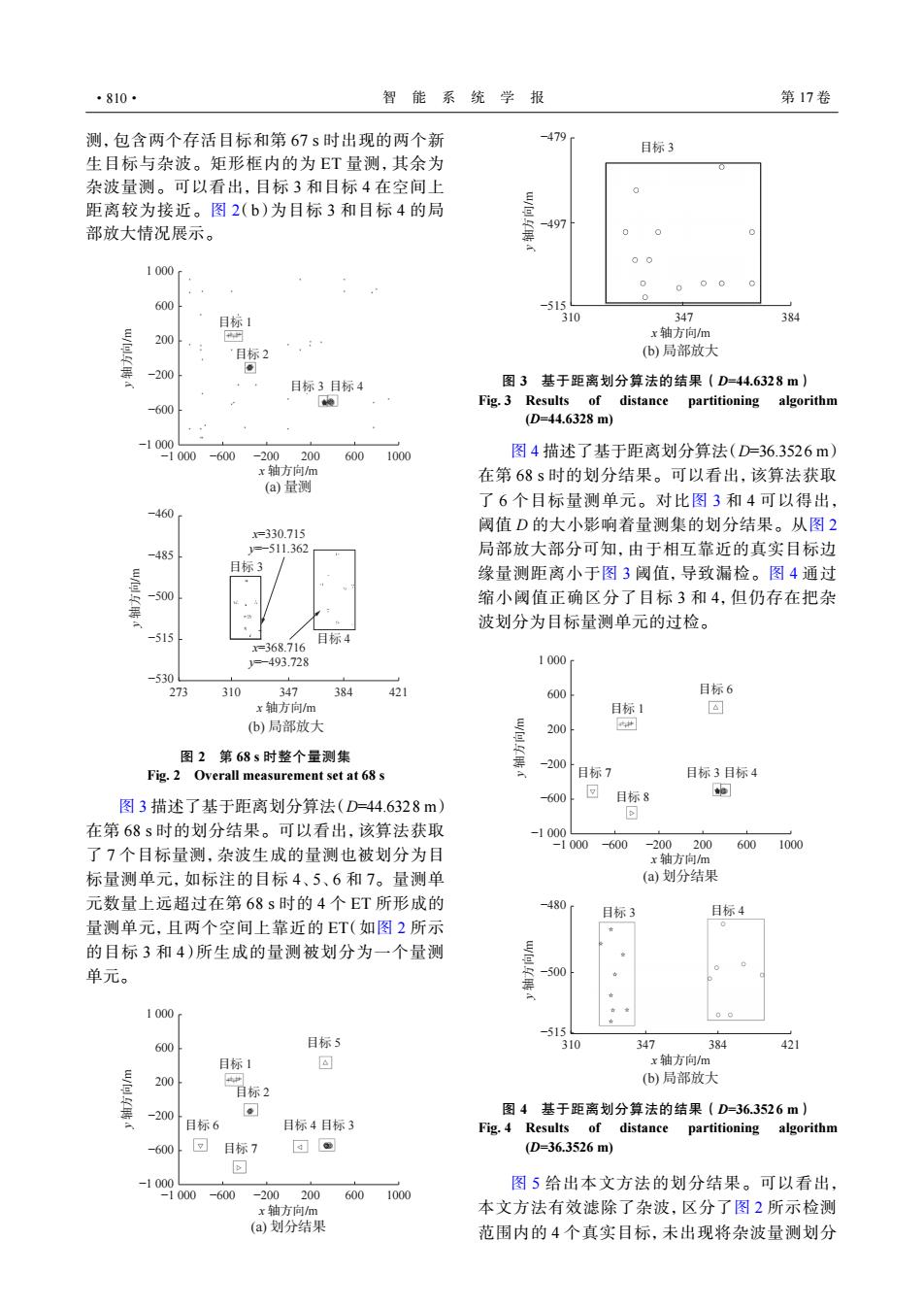
·810· 智能系统学报 第17卷 测,包含两个存活目标和第67s时出现的两个新 -479 目标3 生目标与杂波。矩形框内的为ET量测,其余为 杂波量测。可以看出,目标3和目标4在空间上 0 距离较为接近。图2(b)为目标3和目标4的局 部放大情况展示。 -497 00 1000 0 0 00 0 600 -5154 目标1 310 347 384 200 x轴方向m 目标2 (b)局部放大 -200 目标3目标4 图3基于距离划分算法的结果(D=44.6328m) -600 Fig.3 Results of distance partitioning algorithm (D=44.6328m) -10 1000 -600 -200 200 600 1000 图4描述了基于距离划分算法(D=36.3526m) x轴方向m 在第8s时的划分结果。可以看出,该算法获取 (a)量测 了6个目标量测单元。对比图3和4可以得出, -460 1=330.715 阈值D的大小影响着量测集的划分结果。从图2 -485 =-511.362 局部放大部分可知,由于相互靠近的真实目标边 目标3 缘量测距离小于图3阈值,导致漏检。图4通过 -500 缩小阈值正确区分了目标3和4,但仍存在把杂 波划分为目标量测单元的过检。 -515 目标4 3=368.716 =-493.728 1000 -530 273 310 347 384 42 600 目标6 x轴方向m 目标1 @ b)局部放大 200 # 图2第68s时整个量测集 -200 Fig.2 Overall measurement set at 68 s 目标7 目标3目标4 回 啊 图3描述了基于距离划分算法(D=44.6328m) -600 日标8 D 在第68s时的划分结果。可以看出,该算法获取 -1000 -1000 -600 -200200 6001000 了7个目标量测,杂波生成的量测也被划分为目 x轴方向m 标量测单元,如标注的目标4、5、6和7。量测单 (a)划分结果 元数量上远超过在第68s时的4个ET所形成的 -480 目标3 目标4 量测单元,且两个空间上靠近的ET(如图2所示 的目标3和4)所生成的量测被划分为一个量测 单元。 -500 1000 -515 600 目标5 310 347 384 421 目标1 @ x轴方向m 国 200 (b)局部放大 目标2 -200 图4基于距离划分算法的结果(D=36.3526m) 目标6 目标4目标3 Fig.4 Results of distance partitioning algorithm -600 回 目标7 回国 (D=36.3526m) 回 -1000 图5给出本文方法的划分结果。可以看出, 1000-600 -200200 6001000 x轴方向m 本文方法有效滤除了杂波,区分了图2所示检测 (a)划分结果 范围内的4个真实目标,未出现将杂波量测划分测,包含两个存活目标和第 67 s 时出现的两个新 生目标与杂波。矩形框内的为 ET 量测,其余为 杂波量测。可以看出,目标 3 和目标 4 在空间上 距离较为接近。图 2(b)为目标 3 和目标 4 的局 部放大情况展示。 −500 −515 −530 −485 −460 273 347 310 x 轴方向/m (b) 局部放大 目标 4 x=330.715 y=−511.362 x=368.716 y=−493.728 目标 3 y 轴方向/m 384 421 −1 000 −1 000 −200 −600 600 200 1 000 −600 −200 200 x 轴方向/m (a) 量测 目标 1 目标 2 y 目标 3 目标 4 轴方向/m 600 1000 图 2 第 68 s 时整个量测集 Fig. 2 Overall measurement set at 68 s 图 3 描述了基于距离划分算法(D=44.6328 m) 在第 68 s 时的划分结果。可以看出,该算法获取 了 7 个目标量测,杂波生成的量测也被划分为目 标量测单元,如标注的目标 4、5、6 和 7。量测单 元数量上远超过在第 68 s 时的 4 个 ET 所形成的 量测单元,且两个空间上靠近的 ET(如图 2 所示 的目标 3 和 4)所生成的量测被划分为一个量测 单元。 −1 000 −1 000 −200 −600 600 200 1 000 −600 −200 200 x 轴方向/m (a) 划分结果 目标 1 目标 2 目标 6 目标 7 目标 3 目标 5 y 目标 4 轴方向/m 600 1000 −497 −515 −479 310 347 x 轴方向/m (b) 局部放大 目标 3 y 轴方向/m 384 −1 000 −1 000 −200 −600 600 200 1 000 −600 −200 200 x 轴方向/m (a) 划分结果 目标 1 目标 2 目标 6 目标 7 目标 3 目标 5 y 目标 4 轴方向/m 600 1000 −497 −515 −479 310 347 x 轴方向/m (b) 局部放大 目标 3 y 轴方向/m 384 图 3 基于距离划分算法的结果(D=44.6328 m) Fig. 3 Results of distance partitioning algorithm (D=44.6328 m) 图 4 描述了基于距离划分算法(D=36.3526 m) 在第 68 s 时的划分结果。可以看出,该算法获取 了 6 个目标量测单元。对比图 3 和 4 可以得出, 阈值 D 的大小影响着量测集的划分结果。从图 2 局部放大部分可知,由于相互靠近的真实目标边 缘量测距离小于图 3 阈值,导致漏检。图 4 通过 缩小阈值正确区分了目标 3 和 4,但仍存在把杂 波划分为目标量测单元的过检。 −1 000 −1 000 −200 −600 600 200 1 000 −600 −200 200 x 轴方向/m (a) 划分结果 目标 1 目标 7 目标 8 目标 4 目标 6 y 目标 3 轴方向/m 600 1000 −500 −515 −480 310 347 x 轴方向/m (b) 局部放大 目标 3 目标 4 y 轴方向/m 384 421 图 4 基于距离划分算法的结果(D=36.3526 m) Fig. 4 Results of distance partitioning algorithm (D=36.3526 m) 图 5 给出本文方法的划分结果。可以看出, 本文方法有效滤除了杂波,区分了图 2 所示检测 范围内的 4 个真实目标,未出现将杂波量测划分 ·810· 智 能 系 统 学 报 第 17 卷