正在加载图片...
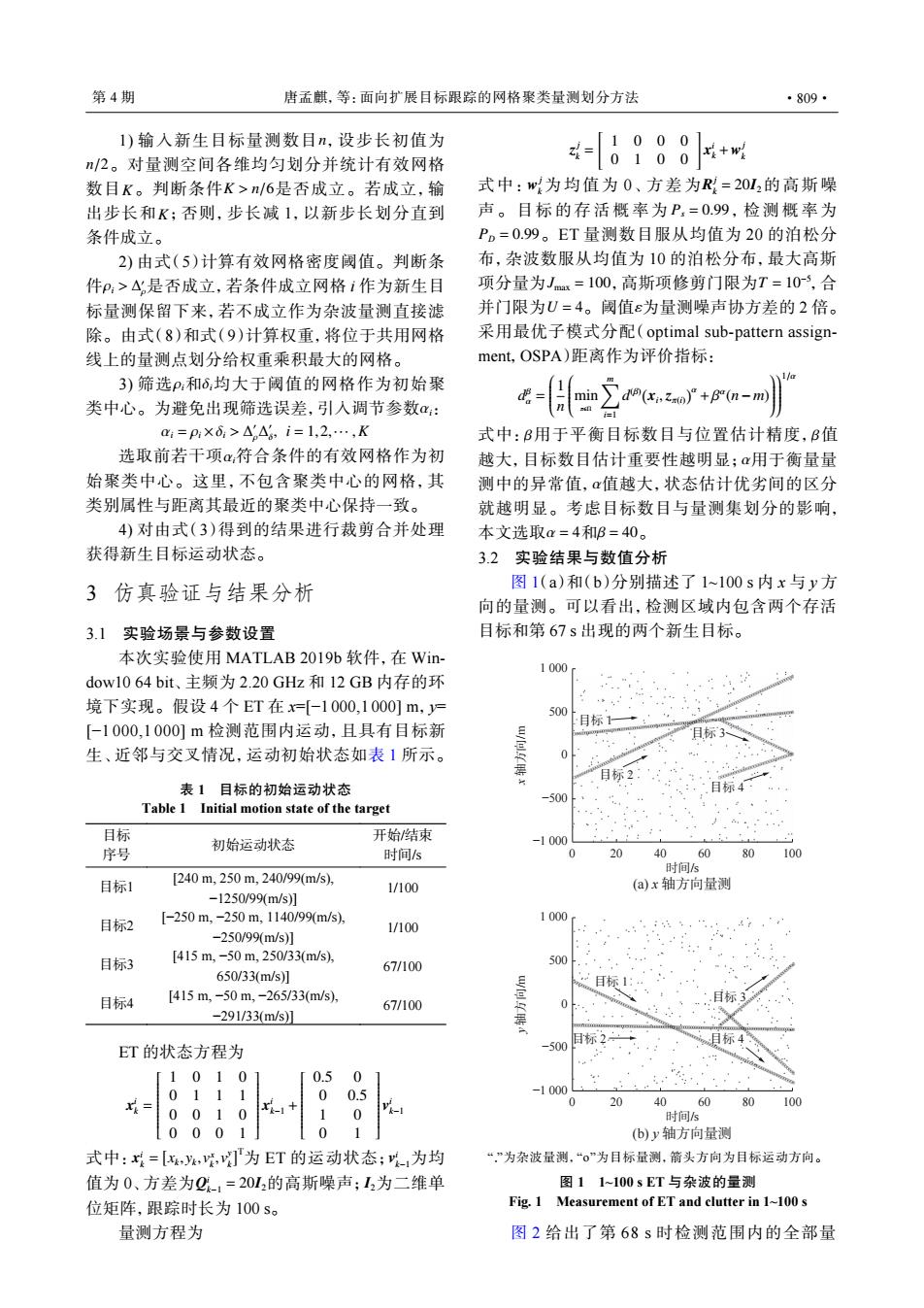
第4期 唐孟麒,等:面向扩展目标跟踪的网格聚类量测划分方法 ·809· 1)输入新生目标量测数目n,设步长初值为 4=0988 /2。对量测空间各维均匀划分并统计有效网格 0100+时 数目K。判断条件K>n/6是否成立。若成立,输 式中:w为均值为0、方差为R=202的高斯噪 出步长和K;否则,步长减1,以新步长划分直到 声。目标的存活概率为P,=0.99,检测概率为 条件成立。 P。=0.99。ET量测数目服从均值为20的泊松分 2)由式(5)计算有效网格密度阈值。判断条 布,杂波数服从均值为10的泊松分布,最大高斯 件Pp:>△:是否成立,若条件成立网格i作为新生目 项分量为J=100,高斯项修剪门限为T=10,合 标量测保留下来,若不成立作为杂波量测直接滤 并门限为U=4。阈值ε为量测噪声协方差的2倍。 除。由式(8)和式(9)计算权重,将位于共用网格 采用最优子模式分配(optimal sub-pattern assign- 线上的量测点划分给权重乘积最大的网格。 ment,OSPA)距离作为评价指标: 3)筛选P:和6,均大于阈值的网格作为初始聚 1/a 类中心。为避免出现筛选误差,引入调节参数a: a:=p×6>△A,i=1,2,…,K 式中:B用于平衡目标数目与位置估计精度,B值 选取前若干项α,符合条件的有效网格作为初 越大,目标数目估计重要性越明显;α用于衡量量 始聚类中心。这里,不包含聚类中心的网格,其 测中的异常值,α值越大,状态估计优劣间的区分 类别属性与距离其最近的聚类中心保持一致。 就越明显。考虑目标数目与量测集划分的影响, 4)对由式(3)得到的结果进行裁剪合并处理 本文选取a=4和B=40。 获得新生目标运动状态。 3.2实验结果与数值分析 3仿真验证与结果分析 图1(a)和(b)分别描述了1~100s内x与y方 向的量测。可以看出,检测区域内包含两个存活 3.1实验场景与参数设置 目标和第67s出现的两个新生目标。 本次实验使用MATLAB2019b软件,在Win- 1000 dow1064bit、主频为2.20GHz和12GB内存的环 境下实现。假设4个ET在x=[-1000,1000]m,= 500 [-1000,1000]m检测范围内运动,且具有目标新 目标1 目标3 生、近邻与交叉情况,运动初始状态如表1所示。 0 目标2 表1目标的初始运动状态 日标4 -500 Table 1 Initial motion state of the target 目标 开始结束 初始运动状态 -10004 序号 时间/s 20 40 60 80100 时间s 目标1 [240m,250m,240/99(m/s) 1/100 (a)x轴方向量测 -1250/99m/s)] 目标2 [-250m,-250m,1140/99(m/s), 1000. 1/100 -250/99(m/s)1 目标3 [415m,-50m,250/33(m/s). 67/100 500 650/33(m/s)] 心目标1:“ 目标4 [415m,-50m,-265/33(m/s), 67/100 04 :.目标3 -291/33m/s)] ET的状态方程为 -500标2 月标4 [10101 「0.50 0111 00.5 -1000 = 0 20 4060 80100 0010 1 0 时间s 10001 01 (b)y轴方向量测 式中:x=[wy%,,灯为ET的运动状态;为均 “”为杂波量测.“o”为目标量测.箭头方向为目标运动方向。 值为0、方差为Q-1=2012的高斯噪声;12为二维单 图11~100sET与杂波的量测 位矩阵,跟踪时长为100s。 Fig.1 Measurement of ET and clutter in 1~100 s 量测方程为 图2给出了第68s时检测范围内的全部量n n/2 K K > n/6 K 1) 输入新生目标量测数目 ,设步长初值为 。对量测空间各维均匀划分并统计有效网格 数目 。判断条件 是否成立。若成立,输 出步长和 ;否则,步长减 1,以新步长划分直到 条件成立。 ρi > ∆ ′ ρ 2) 由式(5)计算有效网格密度阈值。判断条 件 是否成立,若条件成立网格 i 作为新生目 标量测保留下来,若不成立作为杂波量测直接滤 除。由式(8)和式(9)计算权重,将位于共用网格 线上的量测点划分给权重乘积最大的网格。 ρi δi αi 3) 筛选 和 均大于阈值的网格作为初始聚 类中心。为避免出现筛选误差,引入调节参数 : αi = ρi ×δi > ∆ ′ ρ∆ ′ δ , i = 1,2,··· ,K 选取前若干项αi符合条件的有效网格作为初 始聚类中心。这里,不包含聚类中心的网格,其 类别属性与距离其最近的聚类中心保持一致。 4) 对由式(3)得到的结果进行裁剪合并处理 获得新生目标运动状态。 3 仿真验证与结果分析 3.1 实验场景与参数设置 本次实验使用 MATLAB 2019b 软件,在 Window10 64 bit、主频为 2.20 GHz 和 12 GB 内存的环 境下实现。假设 4 个 ET 在 x=[−1 000,1 000] m,y= [−1 000,1 000] m 检测范围内运动,且具有目标新 生、近邻与交叉情况,运动初始状态如表 1 所示。 表 1 目标的初始运动状态 Table 1 Initial motion state of the target 目标 序号 初始运动状态 开始/结束 时间/s 目标1 [240 m, 250 m, 240/99(m/s), −1250/99(m/s)] 1/100 目标2 [−250 m, −250 m, 1140/99(m/s), −250/99(m/s)] 1/100 目标3 [415 m, −50 m, 250/33(m/s), 650/33(m/s)] 67/100 目标4 [415 m, −50 m, −265/33(m/s), −291/33(m/s)] 67/100 ET 的状态方程为 x i k = 1 0 1 0 0 1 1 1 0 0 1 0 0 0 0 1 x i k−1 + 0.5 0 0 0.5 1 0 0 1 v i k−1 x i k = [ xk , yk , v x k , v y k ]T v i k−1 Q i k−1 = 20I2 I2 式中: 为 ET 的运动状态; 为均 值为 0、方差为 的高斯噪声; 为二维单 位矩阵,跟踪时长为 100 s。 量测方程为 z j k = [ 1 0 0 0 0 1 0 0 ] x i k +w j k w j k R j k = 20I2 Ps = 0.99 PD = 0.99 Jmax = 100 T = 10−5 U = 4 ε 式中: 为均值为 0、方差为 的高斯噪 声。目标的存活概率为 ,检测概率为 。ET 量测数目服从均值为 20 的泊松分 布,杂波数服从均值为 10 的泊松分布,最大高斯 项分量为 ,高斯项修剪门限为 ,合 并门限为 。阈值 为量测噪声协方差的 2 倍。 采用最优子模式分配(optimal sub-pattern assignment,OSPA)距离作为评价指标: d β α = 1 n min π∈Π ∑m i=1 d (β) ( xi ,zπ(i) )α +β α (n−m) 1/α β β α α α = 4 β = 40 式中: 用于平衡目标数目与位置估计精度, 值 越大,目标数目估计重要性越明显; 用于衡量量 测中的异常值, 值越大,状态估计优劣间的区分 就越明显。考虑目标数目与量测集划分的影响, 本文选取 和 。 3.2 实验结果与数值分析 图 1(a)和(b)分别描述了 1~100 s 内 x 与 y 方 向的量测。可以看出,检测区域内包含两个存活 目标和第 67 s 出现的两个新生目标。 0 −1 000 −500 0 500 1 000 20 40 60 时间/s (a) x 轴方向量测 目标 1 目标 2 目标 4 目标 3 x 轴方向/m 80 100 0 −1 000 −500 0 500 1 000 20 40 60 时间/s (b) y 轴方向量测 目标 1 目标 2 目标 4 目标 3 y 轴方向/m 80 100 · “ ”为杂波量测,“o”为目标量测,箭头方向为目标运动方向。 图 1 1~100 s ET 与杂波的量测 Fig. 1 Measurement of ET and clutter in 1~100 s 图 2 给出了第 68 s 时检测范围内的全部量 第 4 期 唐孟麒,等:面向扩展目标跟踪的网格聚类量测划分方法 ·809·