正在加载图片...
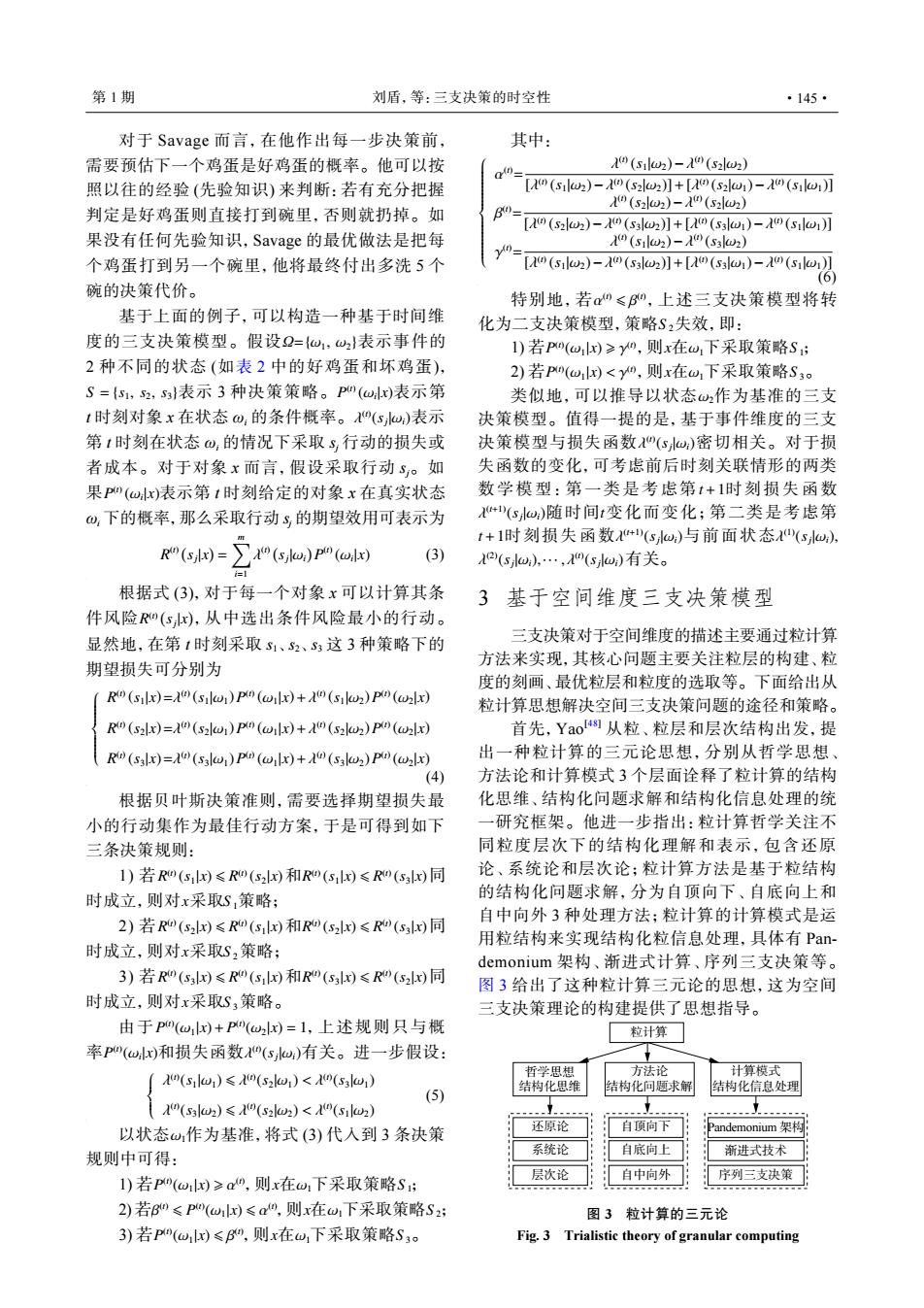
第1期 刘盾,等:三支决策的时空性 ·145· 对于Savage而言,在他作出每一步决策前, 其中: 需要预估下一个鸡蛋是好鸡蛋的概率。他可以按 (slw2)-A(s2lw) a= 照以往的经验(先验知识)来判断:若有充分把握 [(s1l2)-(s2la2】+[0(52lw)-A(s1la)】 判定是好鸡蛋则直接打到碗里,否则就扔掉。如 B0- o(s2lw2)-o(52l2) o(s2w2)-0(s3lw2)】+o(s3lw1)-0(lw1】 果没有任何先验知识,Savage的最优做法是把每 9(sl2)-9(s3lw2) yn= 个鸡蛋打到另一个碗里,他将最终付出多洗5个 [(s1l2)-o(s3l2)]+[λo(s31)-λ0(s1l1)] 碗的决策代价。 (6) 特别地,若a”≤B,上述三支决策模型将转 基于上面的例子,可以构造一种基于时间维 化为二支决策模型,策略S2失效,即: 度的三支决策模型。假设2={w1,w2表示事件的 1)若P()≥y9,则x在w下采取策略S1 2种不同的状态(如表2中的好鸡蛋和坏鸡蛋), 2)若P(w)<0,则x在ω1下采取策略S3。 S={s1,s2,s}表示3种决策策略。P(wx)表示第 类似地,可以推导以状态作为基准的三支 1时刻对象x在状态o,的条件概率。(slω)表示 决策模型。值得一提的是,基于事件维度的三支 第1时刻在状态ω,的情况下采取s行动的损失或 决策模型与损失函数(s)密切相关。对于损 者成本。对于对象x而言,假设采取行动S。如 失函数的变化,可考虑前后时刻关联情形的两类 果Po(wx)表示第1时刻给定的对象x在真实状态 数学模型:第一类是考虑第t+1时刻损失函数 仙,下的概率,那么采取行动s的期望效用可表示为 (so)随时间t变化而变化;第二类是考虑第 R(e树=2reka)pnan t+1时刻损失函数+(so,)与前面状态(sw, (3) λ2(slw),…,(sw)有关。 =1 根据式(3),对于每一个对象x可以计算其条 3基于空间维度三支决策模型 件风险R(s,x,从中选出条件风险最小的行动。 显然地,在第1时刻采取S1、S2、S3这3种策略下的 三支决策对于空间维度的描述主要通过粒计算 期望损失可分别为 方法来实现,其核心问题主要关注粒层的构建、粒 度的刻画、最优粒层和粒度的选取等。下面给出从 R (sx)=A)(slw)P (wx)+A(slw)P((wx) 粒计算思想解决空间三支决策问题的途径和策略。 R(s2x)=A(s2l)P(x)+(52l2)P (w2x) 首先,Yao从粒、粒层和层次结构出发,提 R(s3x)=A(s3l)PD (@)+(s3l2)P(@2x) 出一种粒计算的三元论思想,分别从哲学思想、 (4) 方法论和计算模式3个层面诠释了粒计算的结构 根据贝叶斯决策准则,需要选择期望损失最 化思维、结构化问题求解和结构化信息处理的统 小的行动集作为最佳行动方案,于是可得到如下 一研究框架。他进一步指出:粒计算哲学关注不 三条决策规则: 同粒度层次下的结构化理解和表示,包含还原 1)若R(s,x)≤RO(S2l)和R(s1lw)≤R(s3Ix)同 论、系统论和层次论;粒计算方法是基于粒结构 时成立,则对x采取S策略; 的结构化问题求解,分为自顶向下、自底向上和 2)若R(S2w)≤R(sx)和R0(s2lx)≤R(slx)同 自中向外3种处理方法;粒计算的计算模式是运 用粒结构来实现结构化粒信息处理,具体有Pan- 时成立,则对x采取S2策略; demonium架构、渐进式计算、序列三支决策等。 3)若R(S3lx)≤R(s1x)和Ro(slx)≤R0(s2lx)同 图3给出了这种粒计算三元论的思想,这为空间 时成立,则对x采取S,策略。 三支决策理论的构建提供了思想指导。 由于P(wx)+p(2x)=1,上述规则只与概 粒计算 率p(ww)和损失函数(slw,)有关。进一步假设: 哲学思想 方法论 计算模式 o(slω1)≤o(s2o)<o(s3w) 结构化思维 结构化问题求解 结构化信息处理 (5) A(s3lw2)(s2lw2)<(sil2) 以状态ω,作为基准,将式(3)代入到3条决策 还原论 自顶向下 Pandemonium架构! 规则中可得: 系统论 自底向上 渐进式技术 层次论 自中向外 序列三支决策 I)若p(w1w)≥a9,则x在w,下采取策略S1 2)若B≤p(wx)≤a9则x在a下采取策略S2; 图3粒计算的三元论 3)若P(w,d)≤B,则x在1下采取策略S3o Fig.3 Trialistic theory of granular computing对于 Savage 而言,在他作出每一步决策前, 需要预估下一个鸡蛋是好鸡蛋的概率。他可以按 照以往的经验 (先验知识) 来判断:若有充分把握 判定是好鸡蛋则直接打到碗里,否则就扔掉。如 果没有任何先验知识,Savage 的最优做法是把每 个鸡蛋打到另一个碗里,他将最终付出多洗 5 个 碗的决策代价。 Ω={ω1, ω2} S = {s1, s2, s3} P (t) (ωi |x) λ (t) (sj |ωi) P (t) (ωi |x) 基于上面的例子,可以构造一种基于时间维 度的三支决策模型。假设 表示事件的 2 种不同的状态 (如表 2 中的好鸡蛋和坏鸡蛋), 表示 3 种决策策略。 表示第 t 时刻对象 x 在状态 ωi 的条件概率。 表示 第 t 时刻在状态 ωi 的情况下采取 sj 行动的损失或 者成本。对于对象 x 而言,假设采取行动 sj。如 果 表示第 t 时刻给定的对象 x 在真实状态 ωi 下的概率,那么采取行动 sj 的期望效用可表示为 R (t) ( sj |x ) = ∑m i=1 λ (t) ( sj |ωi ) P (t) (ωi |x) (3) R (t) ( sj |x ) 根据式 (3),对于每一个对象 x 可以计算其条 件风险 ,从中选出条件风险最小的行动。 显然地,在第 t 时刻采取 s1、s2、s3 这 3 种策略下的 期望损失可分别为 R (t) (s1|x)=λ (t) (s1|ω1)P (t) (ω1|x)+λ (t) (s1|ω2)P (t) (ω2|x) R (t) (s2 |x)=λ (t) (s2 |ω1)P (t) (ω1 |x)+λ (t) (s2 |ω2)P (t) (ω2 |x) R (t) (s3 |x)=λ (t) (s3 |ω1)P (t) (ω1 |x)+λ (t) (s3 |ω2)P (t) (ω2 |x) (4) 根据贝叶斯决策准则,需要选择期望损失最 小的行动集作为最佳行动方案,于是可得到如下 三条决策规则: R (t) (s1|x) ⩽ R (t) (s2|x) R (t) (s1|x) ⩽ R (t) (s3|x) x S 1 1) 若 和 同 时成立,则对 采取 策略; R (t) (s2|x) ⩽ R (t) (s1|x) R (t) (s2|x) ⩽ R (t) (s3|x) x S 2 2) 若 和 同 时成立,则对 采取 策略; R (t) (s3|x) ⩽ R (t) (s1|x) R (t) (s3|x) ⩽ R (t) (s2|x) x S 3 3) 若 和 同 时成立,则对 采取 策略。 P (t) (ω1|x)+ P (t) (ω2|x) = 1 P (t) (ωi |x) λ (t) (sj |ωi) 由于 ,上述规则只与概 率 和损失函数 有关。进一步假设: λ (t) (s1|ω1) ⩽ λ (t) (s2|ω1) < λ(t) (s3|ω1) λ (t) (s3|ω2) ⩽ λ (t) (s2|ω2) < λ(t) (s1|ω2) (5) 以状态ω1作为基准,将式 (3) 代入到 3 条决策 规则中可得: P (t) (ω1|x) ⩾ α (t) 1) 若 ,则x在ω1下采取策略 S 1; β (t) ⩽ P (t) (ω1|x) ⩽ α (t) 2) 若 ,则x在ω1下采取策略 S 2; P (t) (ω1|x) ⩽ β (t) 3) 若 ,则x在ω1下采取策略 S 3。 其中: α (t)= λ (t) (s1|ω2)−λ (t) (s2|ω2) [λ (t) (s1|ω2)−λ (t) (s2|ω2)]+[λ (t) (s2|ω1)−λ (t) (s1|ω1)] β (t)= λ (t) (s2|ω2)−λ (t) (s2|ω2) [λ (t) (s2|ω2)−λ (t) (s3|ω2)]+[λ (t) (s3|ω1)−λ (t) (s1|ω1)] γ (t)= λ (t) (s1|ω2)−λ (t) (s3|ω2) [λ (t) (s1|ω2)−λ (t) (s3|ω2)]+[λ (t) (s3|ω1)−λ (t) (s1|ω1)] (6) α (t) ⩽ β (t) S 2 特别地,若 ,上述三支决策模型将转 化为二支决策模型,策略 失效,即: P (t) (ω1|x) ⩾ γ (t) 1) 若 ,则x在ω1下采取策略 S 1; P (t) (ω1|x) < γ(t) 2) 若 ,则x在ω1下采取策略 S 3。 ω2 λ (t) (sj |ωi) t+1 λ (t+1)(sj |ωi) t t+1 λ (t+1)(sj |ωi) λ (1)(sj |ωi), λ (2)(sj |ωi),··· , λ(t) (sj |ωi) 类似地,可以推导以状态 作为基准的三支 决策模型。值得一提的是,基于事件维度的三支 决策模型与损失函数 密切相关。对于损 失函数的变化,可考虑前后时刻关联情形的两类 数学模型:第一类是考虑第 时刻损失函数 随时间 变化而变化;第二类是考虑第 时刻损失函数 与前面状态 有关。 3 基于空间维度三支决策模型 三支决策对于空间维度的描述主要通过粒计算 方法来实现,其核心问题主要关注粒层的构建、粒 度的刻画、最优粒层和粒度的选取等。下面给出从 粒计算思想解决空间三支决策问题的途径和策略。 首先,Yao[48] 从粒、粒层和层次结构出发,提 出一种粒计算的三元论思想,分别从哲学思想、 方法论和计算模式 3 个层面诠释了粒计算的结构 化思维、结构化问题求解和结构化信息处理的统 一研究框架。他进一步指出:粒计算哲学关注不 同粒度层次下的结构化理解和表示,包含还原 论、系统论和层次论;粒计算方法是基于粒结构 的结构化问题求解,分为自顶向下、自底向上和 自中向外 3 种处理方法;粒计算的计算模式是运 用粒结构来实现结构化粒信息处理,具体有 Pandemonium 架构、渐进式计算、序列三支决策等。 图 3 给出了这种粒计算三元论的思想,这为空间 三支决策理论的构建提供了思想指导。 粒计算 计算模式 结构化信息处理 方法论 结构化问题求解 哲学思想 结构化思维 还原论 系统论 层次论 自顶向下 自底向上 自中向外 Pandemonium 架构 渐进式技术 序列三支决策 图 3 粒计算的三元论 Fig. 3 Trialistic theory of granular computing 第 1 期 刘盾,等:三支决策的时空性 ·145·