正在加载图片...
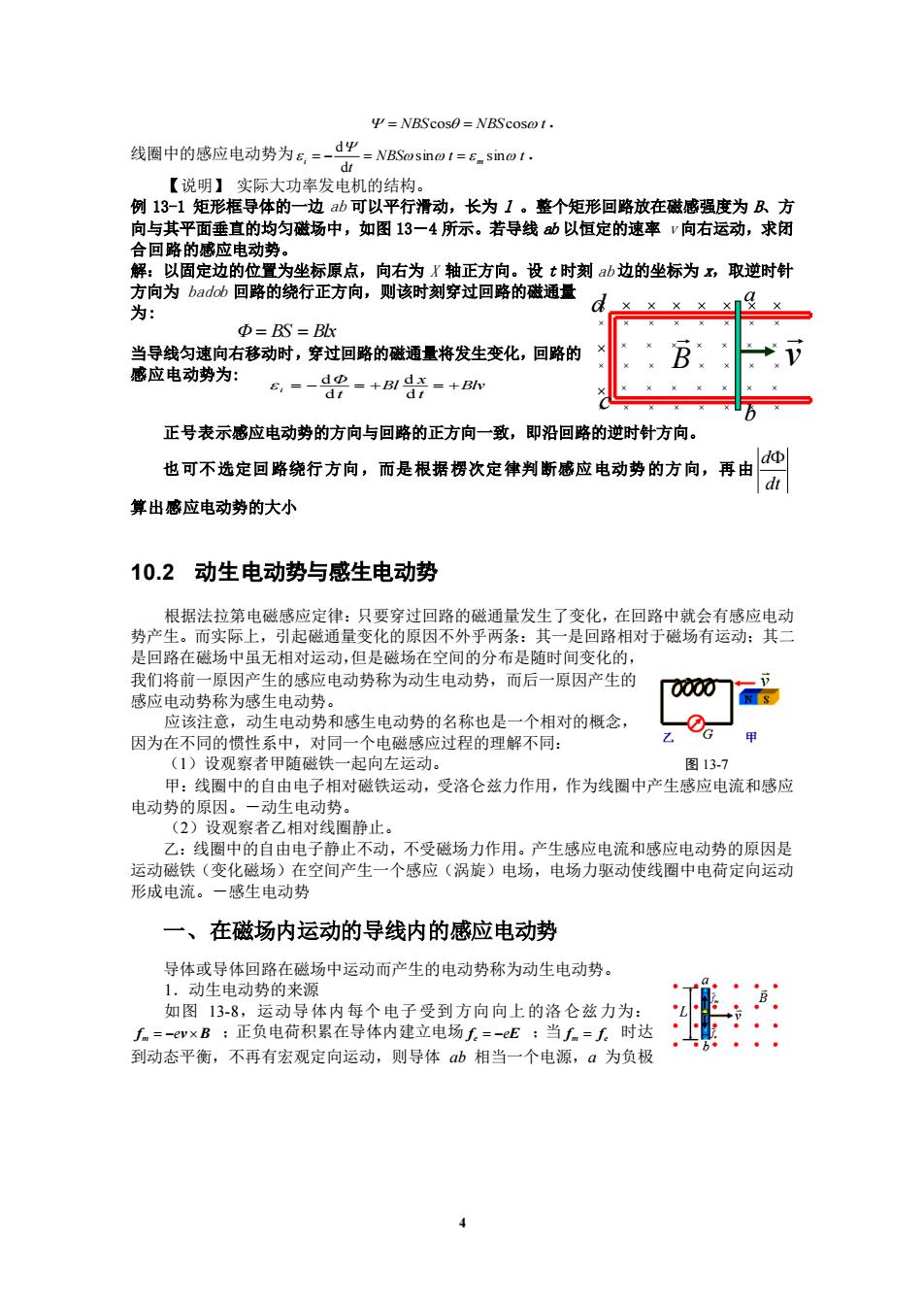
NBScos0 NBScost. 线圈中的感应电动势为石= dΨ NBSosinet=E sinot. 实际大功率发电机的结构 合间部的思点向贴为赖王方向,设:时渊山效静东为五皮地时 向为bab回路的绕行正方向,则该时刻穿过回路的碰通量 为 =BS=Bb 意设省刻离树方移动时路的陆我及生安化,同路的 ,-2-+B器-+B 正号表示感应电动势的方向与回路的正方向一致,即沿回路的逆时针方向。 电可不选定回磨能行方肉,面是复器得大定常男断多应电动身的方肉,情由贸 算出感应电动势的大小 10.2动生电动势与感生电动势 是回路在磁场中虽无相对运动,但是磁场在空间的分布是随时间变化的, 我们将前一原因产生的感应电动势称为动生电动势,而后一原因产生的 感应电动势称为感生电动势。 00a 应该注意,动生电动势和感生电动势的名称也是一个相对的概念, 因为在不同的惯性系中,对同一个电磁感应过程的理解不同: 0a甲 (1)设观察者甲随磁铁一起向左运动。 图13-7 甲:线圈中的自由电子相对磁铁运动,受洛仑兹力作用,作为线圈中产生感应电流和感应 电动势的原因。 线圈 容者乙相对线静止 白由由 动 形成电流。 感生电动势 一、在磁场内运动的导线内的感应电动势 导体或导体回路在磁场中运动而产生的电动势称为动生电动势 1.动生电动势的来源 如图13-8,运动导体内每个电子受到方向向上的洛仑兹力为: f。=-evxB:正负电荷积累在导体内建立电场f=-eE:当f=f时达 到动态平衡,不再有宏观定向运动,则导体b相当一个电源,a为负极4 a b v B d c = NBScos = NBScos t . 线圈中的感应电动势为 NBS t t t i m sin sin d d = − = = . 【说明】 实际大功率发电机的结构。 例 13-1 矩形框导体的一边 ab 可以平行滑动,长为 l 。整个矩形回路放在磁感强度为 B、方 向与其平面垂直的均匀磁场中,如图 13-4 所示。若导线 ab 以恒定的速率 v 向右运动,求闭 合回路的感应电动势。 解:以固定边的位置为坐标原点,向右为 X 轴正方向。设 t 时刻 ab 边的坐标为 x,取逆时针 方向为 badob 回路的绕行正方向,则该时刻穿过回路的磁通量 为: 当导线匀速向右移动时,穿过回路的磁通量将发生变化,回路的 感应电动势为: 正号表示感应电动势的方向与回路的正方向一致,即沿回路的逆时针方向。 也可不选定回路绕行方向,而是根据楞次定律判断感应电动势的方向,再由 dt d 算出感应电动势的大小 10.2 动生电动势与感生电动势 根据法拉第电磁感应定律:只要穿过回路的磁通量发生了变化,在回路中就会有感应电动 势产生。而实际上,引起磁通量变化的原因不外乎两条:其一是回路相对于磁场有运动;其二 是回路在磁场中虽无相对运动,但是磁场在空间的分布是随时间变化的, 我们将前一原因产生的感应电动势称为动生电动势,而后一原因产生的 感应电动势称为感生电动势。 应该注意,动生电动势和感生电动势的名称也是一个相对的概念, 因为在不同的惯性系中,对同一个电磁感应过程的理解不同: (1)设观察者甲随磁铁一起向左运动。 图 13-7 甲:线圈中的自由电子相对磁铁运动,受洛仑兹力作用,作为线圈中产生感应电流和感应 电动势的原因。-动生电动势。 (2)设观察者乙相对线圈静止。 乙:线圈中的自由电子静止不动,不受磁场力作用。产生感应电流和感应电动势的原因是 运动磁铁(变化磁场)在空间产生一个感应(涡旋)电场,电场力驱动使线圈中电荷定向运动 形成电流。-感生电动势 一、在磁场内运动的导线内的感应电动势 导体或导体回路在磁场中运动而产生的电动势称为动生电动势。 1.动生电动势的来源 如图 13-8,运动导体内每个电子受到方向向上的洛仑兹力为: fm = −ev B ;正负电荷积累在导体内建立电场 fe = −eE ;当 m e f = f 时达 到动态平衡,不再有宏观定向运动,则导体 ab 相当一个电源,a 为负极 Φ = BS = Blx Blv t x Bl t Φ i = − = + = + d d d d