正在加载图片...
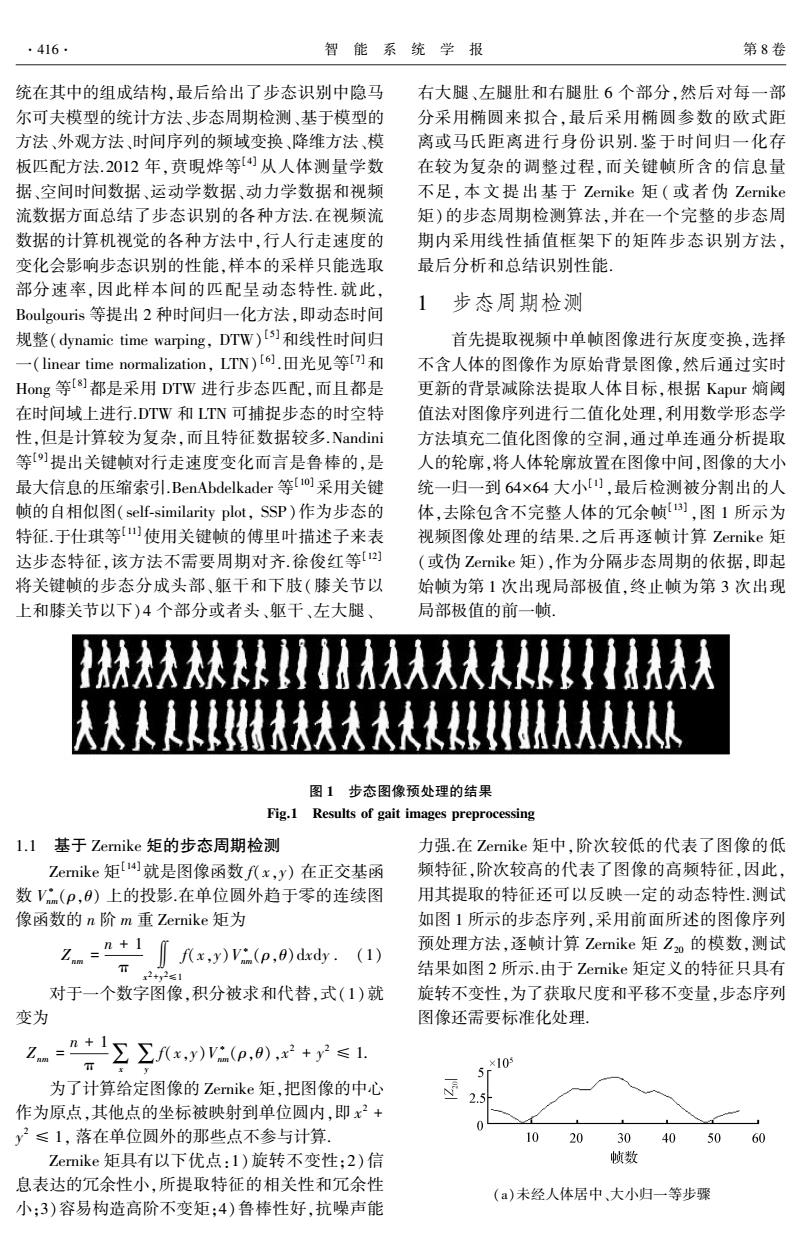
416 智能系统学报 第8卷 统在其中的组成结构,最后给出了步态识别中隐马 右大腿、左腿肚和右腿肚6个部分,然后对每一部 尔可夫模型的统计方法、步态周期检测、基于模型的 分采用椭圆来拟合,最后采用椭圆参数的欧式距 方法、外观方法、时间序列的频域变换、降维方法、模 离或马氏距离进行身份识别.鉴于时间归一化存 板匹配方法.2012年,贲現烨等从人体测量学数 在较为复杂的调整过程,而关键帧所含的信息量 据、空间时间数据、运动学数据、动力学数据和视频 不足,本文提出基于Zernike矩(或者伪Zernike 流数据方面总结了步态识别的各种方法.在视频流 矩)的步态周期检测算法,并在一个完整的步态周 数据的计算机视觉的各种方法中,行人行走速度的 期内采用线性插值框架下的矩阵步态识别方法, 变化会影响步态识别的性能,样本的采样只能选取 最后分析和总结识别性能, 部分速率,因此样本间的匹配呈动态特性.就此, 1 Boulgouris等提出2种时间归一化方法,即动态时间 步态周期检测 规整(dynamic time warping,DTW))和线性时间归 首先提取视频中单帧图像进行灰度变换,选择 一(linear time normalization,LTN)[6.田光见等f]和 不含人体的图像作为原始背景图像,然后通过实时 Hog等[8)都是采用DTW进行步态匹配,而且都是 更新的背景减除法提取人体目标,根据Kapur嫡阈 在时间域上进行.DTW和LTN可捕捉步态的时空特 值法对图像序列进行二值化处理,利用数学形态学 性,但是计算较为复杂,而且特征数据较多.Nandini 方法填充二值化图像的空洞,通过单连通分析提取 等)提出关键帧对行走速度变化而言是鲁棒的,是 人的轮廓,将人体轮廓放置在图像中间,图像的大小 最大信息的压缩索引.BenAbdelkader等[o]采用关键 统一归一到64×64大小),最后检测被分割出的人 帧的自相似图(self-similarity plot,SSP)作为步态的 体,去除包含不完整人体的冗余帧),图1所示为 特征于仕琪等)使用关键帧的傅里叶描述子来表 视频图像处理的结果.之后再逐帧计算Zernike矩 达步态特征,该方法不需要周期对齐.徐俊红等[] (或伪Zernike矩),作为分隔步态周期的依据,即起 将关键帧的步态分成头部、躯干和下肢(膝关节以 始帧为第1次出现局部极值,终止帧为第3次出现 上和膝关节以下)4个部分或者头、躯干、左大腿、 局部极值的前一帧。 图1步态图像预处理的结果 Fig.1 Results of gait images preprocessing l.l基于Zernike矩的步态周期检测 力强.在Zernike矩中,阶次较低的代表了图像的低 Zernike矩就是图像函数f(x,y)在正交基函 频特征,阶次较高的代表了图像的高频特征,因此, 数Vm(P,9)上的投影.在单位圆外趋于零的连续图 用其提取的特征还可以反映一定的动态特性.测试 像函数的n阶m重Zernike矩为 如图1所示的步态序列,采用前面所述的图像序列 2n=+1 ∬fx,y)Va(p,)dxdy.(1) 预处理方法,逐帧计算Zernike矩Zo的模数,测试 下2+3261 结果如图2所示.由于Zernike矩定义的特征只具有 对于一个数字图像,积分被求和代替,式(1)就 旋转不变性,为了获取尺度和平移不变量,步态序列 变为 图像还需要标准化处理, 名=”告Σ,.0+≤1 ×10 为了计算给定图像的Zernike矩,把图像的中心 作为原点,其他点的坐标被映射到单位圆内,即x2+ y2≤1,落在单位圆外的那些点不参与计算, 10 2030 40 50 60 Zernike矩具有以下优点:1)旋转不变性;2)信 帧数 息表达的冗余性小,所提取特征的相关性和冗余性 (a)未经人体居中、大小归一等步骤 小:3)容易构造高阶不变矩:4)鲁棒性好,抗噪声能统在其中的组成结构ꎬ最后给出了步态识别中隐马 尔可夫模型的统计方法、步态周期检测、基于模型的 方法、外观方法、时间序列的频域变换、降维方法、模 板匹配方法.2012 年ꎬ贲晛烨等[4] 从人体测量学数 据、空间时间数据、运动学数据、动力学数据和视频 流数据方面总结了步态识别的各种方法.在视频流 数据的计算机视觉的各种方法中ꎬ行人行走速度的 变化会影响步态识别的性能ꎬ样本的采样只能选取 部分速率ꎬ因此样本间的匹配呈动态特性. 就此ꎬ Boulgouris 等提出 2 种时间归一化方法ꎬ即动态时间 规整(dynamic time warpingꎬ DTW) [5]和线性时间归 一(linear time normalizationꎬ LTN) [6] .田光见等[7]和 Hong 等[8]都是采用 DTW 进行步态匹配ꎬ而且都是 在时间域上进行.DTW 和 LTN 可捕捉步态的时空特 性ꎬ但是计算较为复杂ꎬ而且特征数据较多.Nandini 等[9]提出关键帧对行走速度变化而言是鲁棒的ꎬ是 最大信息的压缩索引.BenAbdelkader 等[10]采用关键 帧的自相似图(self ̄similarity plotꎬ SSP)作为步态的 特征.于仕琪等[11]使用关键帧的傅里叶描述子来表 达步态特征ꎬ该方法不需要周期对齐.徐俊红等[12] 将关键帧的步态分成头部、躯干和下肢(膝关节以 上和膝关节以下)4 个部分或者头、躯干、左大腿、 右大腿、左腿肚和右腿肚 6 个部分ꎬ然后对每一部 分采用椭圆来拟合ꎬ最后采用椭圆参数的欧式距 离或马氏距离进行身份识别.鉴于时间归一化存 在较为复杂的调整过程ꎬ而关键帧所含的信息量 不足ꎬ 本 文 提 出 基 于 Zernike 矩 ( 或 者 伪 Zernike 矩)的步态周期检测算法ꎬ并在一个完整的步态周 期内采用线性插值框架下的矩阵步态识别方法ꎬ 最后分析和总结识别性能. 1 步态周期检测 首先提取视频中单帧图像进行灰度变换ꎬ选择 不含人体的图像作为原始背景图像ꎬ然后通过实时 更新的背景减除法提取人体目标ꎬ根据 Kapur 熵阈 值法对图像序列进行二值化处理ꎬ利用数学形态学 方法填充二值化图像的空洞ꎬ通过单连通分析提取 人的轮廓ꎬ将人体轮廓放置在图像中间ꎬ图像的大小 统一归一到 64×64 大小[1] ꎬ最后检测被分割出的人 体ꎬ去除包含不完整人体的冗余帧[13] ꎬ图 1 所示为 视频图像处理的结果.之后再逐帧计算 Zernike 矩 (或伪 Zernike 矩)ꎬ作为分隔步态周期的依据ꎬ即起 始帧为第 1 次出现局部极值ꎬ终止帧为第 3 次出现 局部极值的前一帧. 图 1 步态图像预处理的结果 Fig.1 Results of gait images preprocessing 1.1 基于 Zernike 矩的步态周期检测 Zernike 矩[14]就是图像函数 f(xꎬy) 在正交基函 数 V ∗ nm(ρꎬθ) 上的投影.在单位圆外趋于零的连续图 像函数的 n 阶 m 重 Zernike 矩为 Znm = n + 1 π ∬ x 2+y 2≤1 f(xꎬy)V ∗ nm(ρꎬθ)dxdy . (1) 对于一个数字图像ꎬ积分被求和代替ꎬ式(1)就 变为 Znm = n + 1 π ∑x ∑y f(xꎬy)V ∗ nm(ρꎬθ)ꎬx 2 + y 2 ≤ 1. 为了计算给定图像的 Zernike 矩ꎬ把图像的中心 作为原点ꎬ其他点的坐标被映射到单位圆内ꎬ即 x 2 + y 2 ≤ 1ꎬ 落在单位圆外的那些点不参与计算. Zernike 矩具有以下优点:1)旋转不变性ꎻ2)信 息表达的冗余性小ꎬ所提取特征的相关性和冗余性 小ꎻ3)容易构造高阶不变矩ꎻ4)鲁棒性好ꎬ抗噪声能 力强.在 Zernike 矩中ꎬ阶次较低的代表了图像的低 频特征ꎬ阶次较高的代表了图像的高频特征ꎬ因此ꎬ 用其提取的特征还可以反映一定的动态特性.测试 如图 1 所示的步态序列ꎬ采用前面所述的图像序列 预处理方法ꎬ逐帧计算 Zernike 矩 Z20 的模数ꎬ测试 结果如图 2 所示.由于 Zernike 矩定义的特征只具有 旋转不变性ꎬ为了获取尺度和平移不变量ꎬ步态序列 图像还需要标准化处理. (a)未经人体居中、大小归一等步骤 416 智 能 系 统 学 报 第 8 卷