正在加载图片...
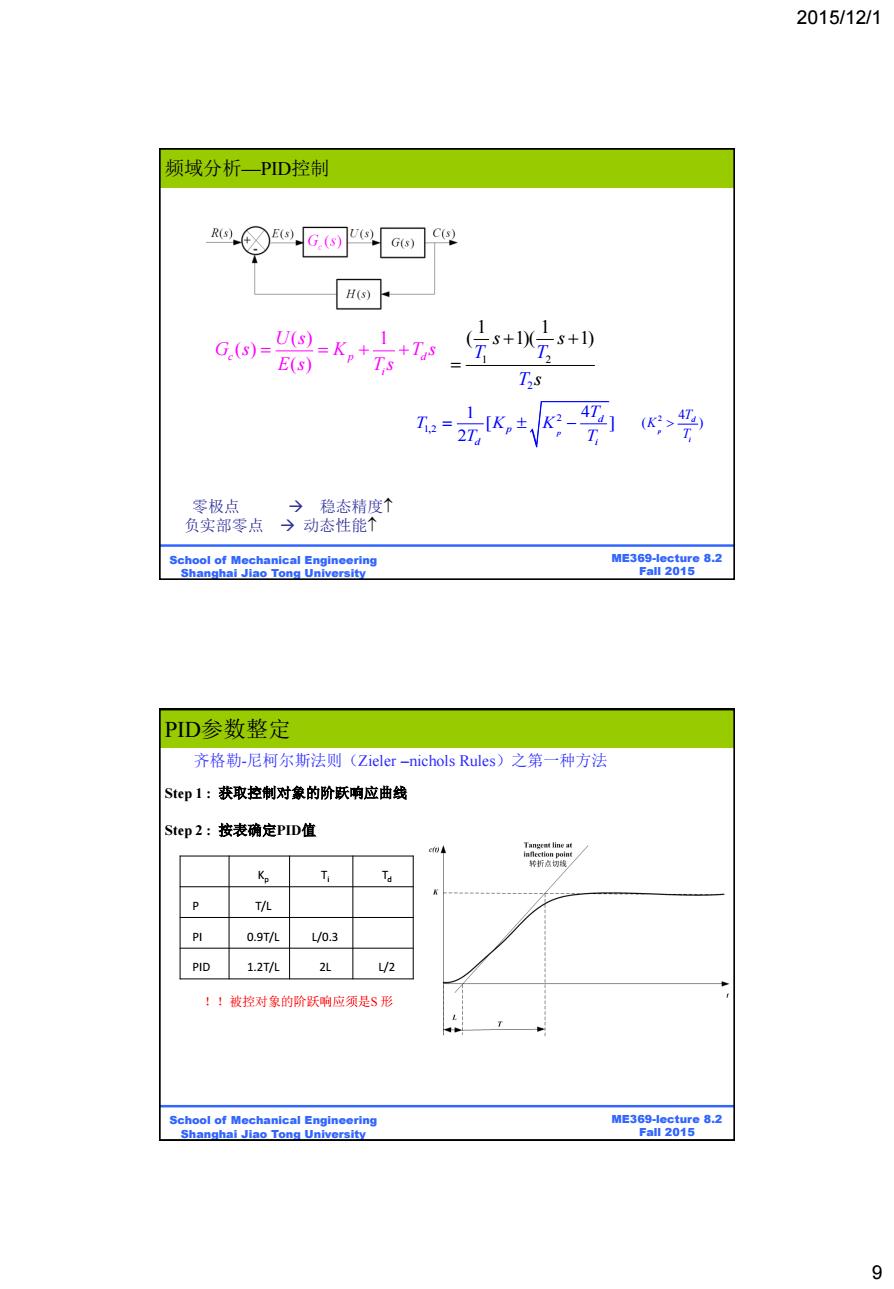
2015/12/1 频域分析PD控制 ☒G.T G(s) H(s) G(s)= U(S=K,+ 1 s+1) +Ts E(s) Ts Ts 1 4T T2= [K,±K (K2> 零极点 →稳态精度个 负实部零点→动态性能个 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 PID参数整定 齐格勒-尼柯尔斯法则(Zieler-nichols Rules)之第一种方法 Step1:获取控制对象的阶跃响应曲线 Step2:按表确定PID值 Tangeat line at 转折切线 Kp T/L 0.9T/L L/0.3 PID 1.2T/L 2 !!被控对象的阶跃响应须是S形 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 92015/12/1 9 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University ( ) 1 ( ) ( ) c p d i U s G s K T s E s T s 2 1,2 1 4 [ ] 2 p d p d i T T K K T T 2 4 ( ) p d i T K T 零极点 稳态精度 负实部零点 动态性能 1 2 2 1 1 ( 1)( 1) T s s T T s 频域分析—PID控制 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University PID参数整定 齐格勒-尼柯尔斯法则(Zieler –nichols Rules)之第一种方法 !!被控对象的阶跃响应须是S 形 Step 1 : 获取控制对象的阶跃响应曲线 Step 2 : 按表确定PID值 Kp Ti Td P T/L PI 0.9T/L L/0.3 PID 1.2T/L 2L L/2