正在加载图片...
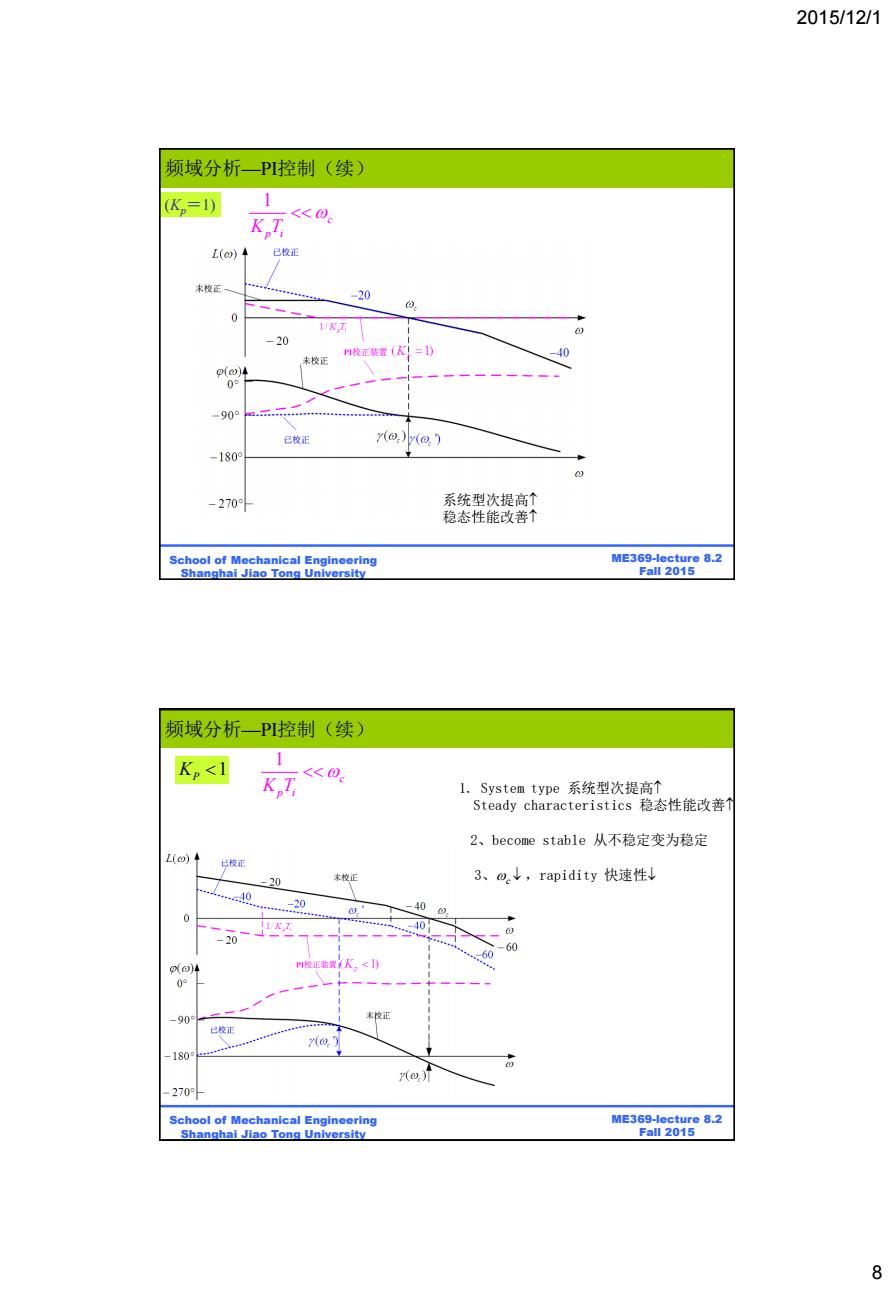
2015/12/1 频域分析PI控制(续) (K2=1) 1 K T <<0 L()◆ 已校正 术校正 20 0 -20 校正装置(K!=1) -40 未校正 p()4 0° 900.mm 已枚正 y(o.)(o.) -180° -270 系统型次提高个 稳态性能改善个 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 频域分析一PI控制(续) K<1 1 KT <<0 l.System type系统型次提高↑ Steady characteristics稳态性能改善T 2、become stable从不稳定变为稳定 L() 已校正 20 末校正 3、o,↓,rapidity快速性↓ 40 -20 40 40 20 60 -60 o)4 90 校正 已校正 180 ro. 270 School of Mechanical Engineering ME369-lecture 8.2 Shanghai Jiao Tong University Fall 2015 82015/12/1 8 BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 系统型次提高 稳态性能改善 1 c K Tp i (Kp=1) 频域分析—PI控制(续) BE315-Lecture 8.2 Fall 2011 ME369-lecture 8.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 2、become stable 从不稳定变为稳定 3、c ,rapidity 快速性 KP 1 1 c K Tp i 1. System type 系统型次提高 Steady characteristics 稳态性能改善 频域分析—PI控制(续)