正在加载图片...
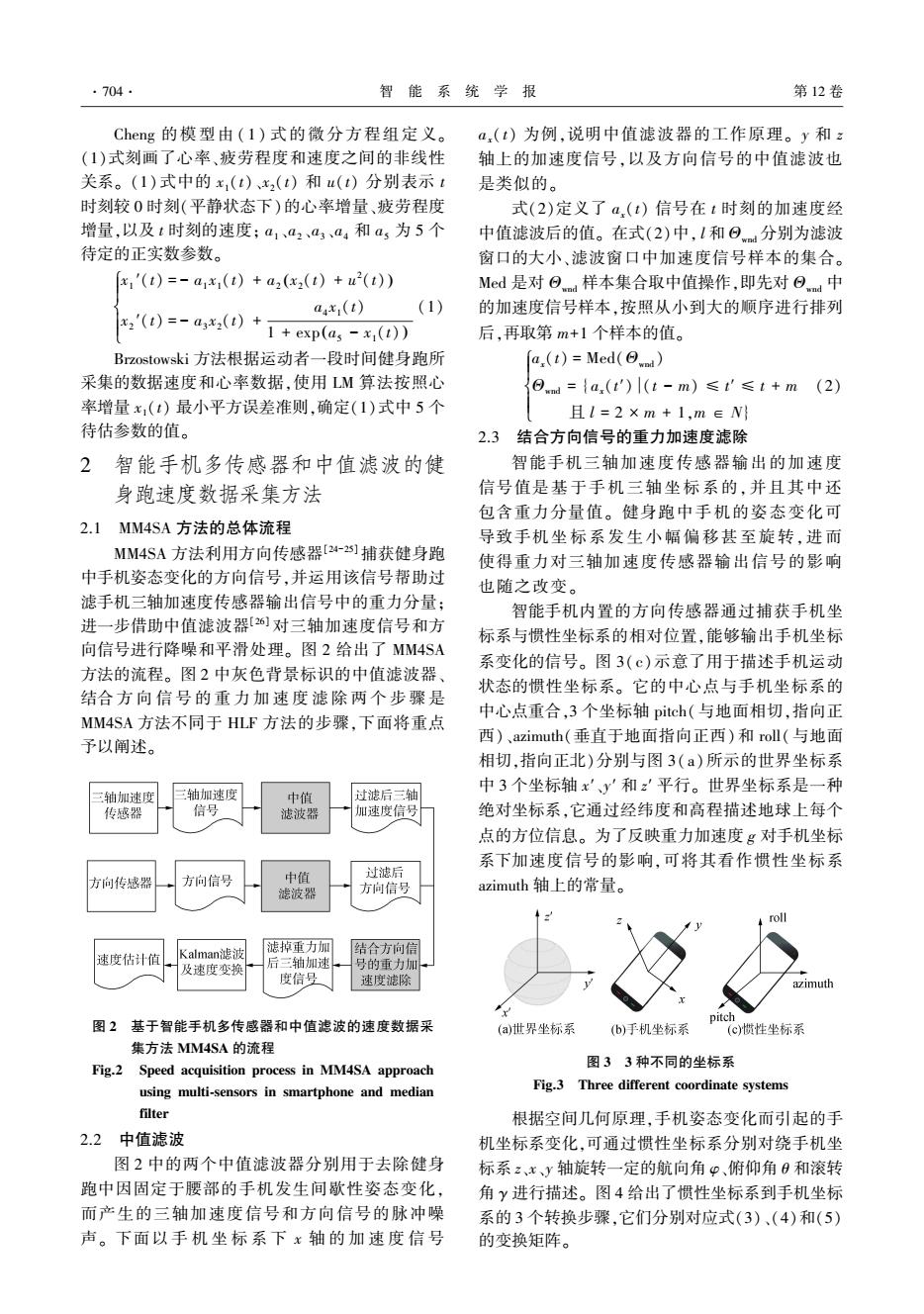
.704. 智能系统学报 第12卷 Cheng的模型由(1)式的微分方程组定义。 a,(t)为例,说明中值滤波器的工作原理。y和z (1)式刻画了心率、疲劳程度和速度之间的非线性 轴上的加速度信号,以及方向信号的中值滤波也 关系。(1)式中的x,(t)、x,(t)和u(t)分别表示t 是类似的。 时刻较0时刻(平静状态下)的心率增量、疲劳程度 式(2)定义了a,(t)信号在t时刻的加速度经 增量,以及t时刻的速度;a1、a2、a3、a4和a5为5个 中值滤波后的值。在式(2)中,l和⊙分别为滤波 待定的正实数参数。 窗口的大小、滤波窗口中加速度信号样本的集合。 x,'(t)=-a1x(t)+a2(x2(t)+u2(t)) Med是对O样本集合取中值操作,即先对O中 axx(1) (1) 的加速度信号样本,按照从小到大的顺序进行排列 x2'(t)=-a3x2(t)+ 1+exp(a5-x1(t)) 后,再取第m+1个样本的值。 Brzostowski方法根据运动者一段时间健身跑所 a,(t)=Med() 采集的数据速度和心率数据,使用LM算法按照心 ⊙a={a.(t')l(t-m)≤t'≤t+m(2) 率增量x(t)最小平方误差准则,确定(1)式中5个 且l=2×m+1,m∈N} 待估参数的值。 2.3 结合方向信号的重力加速度滤除 2智能手机多传感器和中值滤波的健 智能手机三轴加速度传感器输出的加速度 身跑速度数据采集方法 信号值是基于手机三轴坐标系的,并且其中还 包含重力分量值。健身跑中手机的姿态变化可 2.1MM4SA方法的总体流程 导致手机坐标系发生小幅偏移甚至旋转,进而 MM4SA方法利用方向传感器[24-2]捕获健身跑 使得重力对三轴加速度传感器输出信号的影响 中手机姿态变化的方向信号,并运用该信号帮助过 也随之改变。 滤手机三轴加速度传感器输出信号中的重力分量; 智能手机内置的方向传感器通过捕获手机坐 进一步借助中值滤波器[2]对三轴加速度信号和方 标系与惯性坐标系的相对位置,能够输出手机坐标 向信号进行降噪和平滑处理。图2给出了MM4SA 系变化的信号。图3(c)示意了用于描述手机运动 方法的流程。图2中灰色背景标识的中值滤波器 结合方向信号的重力加速度滤除两个步骤是 状态的惯性坐标系。它的中心点与手机坐标系的 中心点重合,3个坐标轴pitch(与地面相切,指向正 MM4SA方法不同于HLF方法的步骤,下面将重点 予以阐述。 西)、azimuth(垂直于地面指向正西)和ro(与地面 相切,指向正北)分别与图3(a)所示的世界坐标系 中3个坐标轴x'y'和z平行。世界坐标系是一种 三轴加速度 三轴加速度 中值 过滤后三轴 传感器 信号 滤波器 加速度信号 绝对坐标系,它通过经纬度和高程描述地球上每个 点的方位信息。为了反映重力加速度g对手机坐标 系下加速度信号的影响,可将其看作惯性坐标系 方向传感器 方向信号 中值 过滤后 滤波器 方向信号 azimuth轴上的常量。 roll 滤掉重力加 结合方向信 速度估计值 Kalmani滤波 后三轴加速 及速度变换 号的重力加 度信号 速度滤除 azimuth 图2基于智能手机多传感器和中值滤波的速度数据采 pitch (a)世界坐标系 (b)手机坐标系 (c)惯性坐标系 集方法MM4SA的流程 Fig.2 Speed acquisition process in MM4SA approach 图33种不同的坐标系 using multi-sensors in smartphone and median Fig.3 Three different coordinate systems filter 根据空间几何原理,手机姿态变化而引起的手 2.2中值滤波 机坐标系变化,可通过惯性坐标系分别对绕手机坐 图2中的两个中值滤波器分别用于去除健身 标系:、x、y轴旋转一定的航向角p、俯仰角0和滚转 跑中因固定于腰部的手机发生间歇性姿态变化, 角y进行描述。图4给出了惯性坐标系到手机坐标 而产生的三轴加速度信号和方向信号的脉冲噪 系的3个转换步骤,它们分别对应式(3)、(4)和(5) 声。下面以手机坐标系下x轴的加速度信号 的变换矩阵。Cheng 的模型由 ( 1) 式的微分方程组定义。 (1)式刻画了心率、疲劳程度和速度之间的非线性 关系。 (1) 式中的 x1(t)、x2(t) 和 u(t) 分别表示 t 时刻较 0 时刻(平静状态下)的心率增量、疲劳程度 增量,以及 t 时刻的速度; a1 、a2 、a3 、a4 和 a5 为 5 个 待定的正实数参数。 x1 ′(t) = - a1 x1(t) + a2 x2(t) + u 2 ( (t) ) x2 ′(t) = - a3 x2(t) + a4 x1(t) 1 + exp a5 - x ( 1(t) ) ì î í ï ï ï ï (1) Brzostowski 方法根据运动者一段时间健身跑所 采集的数据速度和心率数据,使用 LM 算法按照心 率增量 x1(t) 最小平方误差准则,确定(1)式中 5 个 待估参数的值。 2 智能手机多传感器和中值滤波的健 身跑速度数据采集方法 2.1 MM4SA 方法的总体流程 MM4SA 方法利用方向传感器[24-25] 捕获健身跑 中手机姿态变化的方向信号,并运用该信号帮助过 滤手机三轴加速度传感器输出信号中的重力分量; 进一步借助中值滤波器[26] 对三轴加速度信号和方 向信号进行降噪和平滑处理。 图 2 给出了 MM4SA 方法的流程。 图 2 中灰色背景标识的中值滤波器、 结合 方 向 信 号 的 重 力 加 速 度 滤 除 两 个 步 骤 是 MM4SA 方法不同于 HLF 方法的步骤,下面将重点 予以阐述。 图 2 基于智能手机多传感器和中值滤波的速度数据采 集方法 MM4SA 的流程 Fig.2 Speed acquisition process in MM4SA approach using multi⁃sensors in smartphone and median filter 2.2 中值滤波 图 2 中的两个中值滤波器分别用于去除健身 跑中因固定于腰部的手机发生间歇性姿态变化, 而产生的三轴加速度信号和方向信号的脉冲噪 声。 下面以 手 机 坐 标 系 下 x 轴 的 加 速 度 信 号 ax( t) 为例,说明中值滤波器的工作原理。 y 和 z 轴上的加速度信号,以及方向信号的中值滤波也 是类似的。 式(2)定义了 ax(t) 信号在 t 时刻的加速度经 中值滤波后的值。 在式(2)中, l 和 Θwnd 分别为滤波 窗口的大小、滤波窗口中加速度信号样本的集合。 Med 是对 Θwnd 样本集合取中值操作,即先对 Θwnd 中 的加速度信号样本,按照从小到大的顺序进行排列 后,再取第 m+1 个样本的值。 ax(t) = Med(Θwnd ) Θwnd = {ax(t′) (t - m) ≤ t′ ≤ t + m 且 l = 2 × m + 1,m ∈ N} ì î í ï ï ïï (2) 2.3 结合方向信号的重力加速度滤除 智能手机三轴加速度传感器输出的加速度 信号值是基于手机三轴坐标系的,并且其中还 包含重力分量值。 健身跑中手机的姿态变化可 导致手机坐标系发生小幅偏移甚至旋转,进而 使得重力对三轴加速度传感器输出信号的影响 也随之改变。 智能手机内置的方向传感器通过捕获手机坐 标系与惯性坐标系的相对位置,能够输出手机坐标 系变化的信号。 图 3(c)示意了用于描述手机运动 状态的惯性坐标系。 它的中心点与手机坐标系的 中心点重合,3 个坐标轴 pitch(与地面相切,指向正 西)、azimuth(垂直于地面指向正西)和 roll(与地面 相切,指向正北)分别与图 3( a)所示的世界坐标系 中 3 个坐标轴 x′、y′ 和 z′ 平行。 世界坐标系是一种 绝对坐标系,它通过经纬度和高程描述地球上每个 点的方位信息。 为了反映重力加速度 g 对手机坐标 系下加速度信号的影响,可将其看作惯性坐标系 azimuth 轴上的常量。 图 3 3 种不同的坐标系 Fig.3 Three different coordinate systems 根据空间几何原理,手机姿态变化而引起的手 机坐标系变化,可通过惯性坐标系分别对绕手机坐 标系 z、x、y 轴旋转一定的航向角 φ、俯仰角 θ 和滚转 角 γ 进行描述。 图 4 给出了惯性坐标系到手机坐标 系的 3 个转换步骤,它们分别对应式(3)、(4)和(5) 的变换矩阵。 ·704· 智 能 系 统 学 报 第 12 卷