正在加载图片...
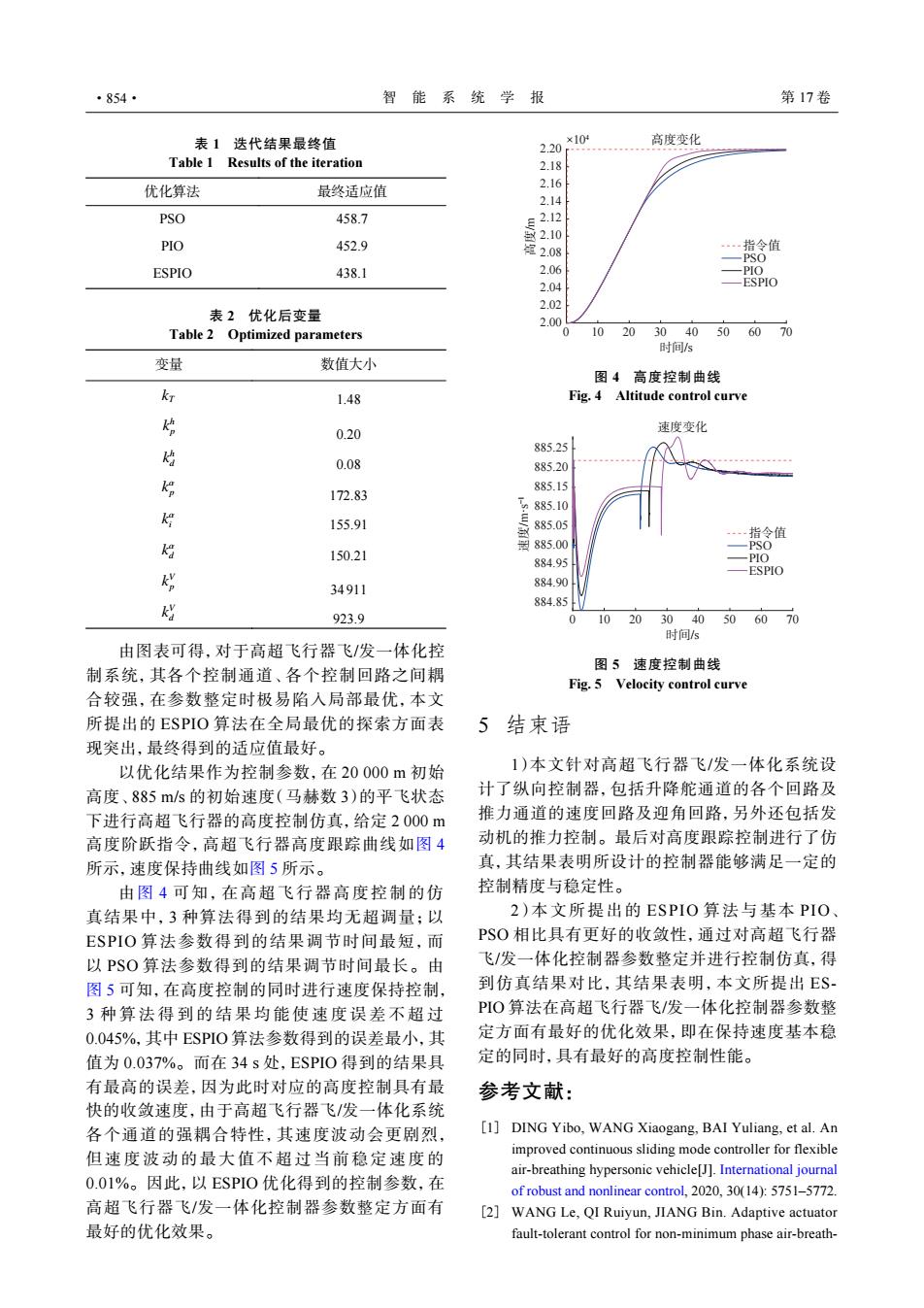
·854· 智能系统学报 第17卷 表1迭代结果最终值 2.20*10 高度变化 Table 1 Results of the iteration 2.18 优化算法 最终适应值 2.16 2.14 PSO 458.7 s2.12 2.10 PIO 452.9 馆2.08 …指令值 -PSO ESPIO 438.1 2.06 PIO 2.04 -ESPIO 2.02 表2优化后变量 2.00 Table 2 Optimized parameters 0 10 203040 506070 时间/s 变量 数值大小 图4高度控制曲线 k 1.48 Fig.4 Altitude control curve 种 0.20 速度变化 好 885.25 0.08 885.20 ke 885.15 172.83 人 885.10 155.91 885.05 …指令值 ☒885.00 -PSO 150.21 884.95 -PIO ESPIO g 34911 884.90 础 884.85 923.9 0 10 20 3040 506070 时间/s 由图表可得,对于高超飞行器飞/发一体化控 图5速度控制曲线 制系统,其各个控制通道、各个控制回路之间耦 Fig.5 Velocity control curve 合较强,在参数整定时极易陷入局部最优,本文 所提出的ESPIO算法在全局最优的探索方面表 5结束语 现突出,最终得到的适应值最好。 以优化结果作为控制参数,在20000m初始 1)本文针对高超飞行器飞/发一体化系统设 高度、885m/s的初始速度(马赫数3)的平飞状态 计了纵向控制器,包括升降舵通道的各个回路及 下进行高超飞行器的高度控制仿真,给定2000m 推力通道的速度回路及迎角回路,另外还包括发 高度阶跃指令,高超飞行器高度跟踪曲线如图4 动机的推力控制。最后对高度跟踪控制进行了仿 所示,速度保持曲线如图5所示。 真,其结果表明所设计的控制器能够满足一定的 由图4可知,在高超飞行器高度控制的仿 控制精度与稳定性。 真结果中,3种算法得到的结果均无超调量;以 2)本文所提出的ESPIO算法与基本PIO、 ESPIO算法参数得到的结果调节时间最短,而 PSO相比具有更好的收敛性,通过对高超飞行器 以PSO算法参数得到的结果调节时间最长。由 飞/发一体化控制器参数整定并进行控制仿真,得 图5可知,在高度控制的同时进行速度保持控制, 到仿真结果对比,其结果表明,本文所提出ES 3种算法得到的结果均能使速度误差不超过 PO算法在高超飞行器飞/发一体化控制器参数整 0.045%,其中ESPI0算法参数得到的误差最小,其 定方面有最好的优化效果,即在保持速度基本稳 值为0.037%。而在34s处,ESPI0得到的结果具 定的同时,具有最好的高度控制性能。 有最高的误差,因为此时对应的高度控制具有最 参考文献: 快的收敛速度,由于高超飞行器飞/发一体化系统 各个通道的强耦合特性,其速度波动会更剧烈, [1]DING Yibo,WANG Xiaogang,BAI Yuliang,et al.An 但速度波动的最大值不超过当前稳定速度的 improved continuous sliding mode controller for flexible air-breathing hypersonic vehicle[J].International journal 0.01%。因此,以ESPIO优化得到的控制参数,在 of robust and nonlinear control,2020,30(14):5751-5772. 高超飞行器飞/发一体化控制器参数整定方面有 [2]WANG Le,QI Ruiyun,JIANG Bin.Adaptive actuator 最好的优化效果。 fault-tolerant control for non-minimum phase air-breath-表 1 迭代结果最终值 Table 1 Results of the iteration 优化算法 最终适应值 PSO 458.7 PIO 452.9 ESPIO 438.1 表 2 优化后变量 Table 2 Optimized parameters 变量 数值大小 kT 1.48 k h p 0.20 k h d 0.08 k α p 172.83 k α i 155.91 k α d 150.21 k V p 34911 k V d 923.9 由图表可得,对于高超飞行器飞/发一体化控 制系统,其各个控制通道、各个控制回路之间耦 合较强,在参数整定时极易陷入局部最优,本文 所提出的 ESPIO 算法在全局最优的探索方面表 现突出,最终得到的适应值最好。 以优化结果作为控制参数,在 20 000 m 初始 高度、885 m/s 的初始速度(马赫数 3)的平飞状态 下进行高超飞行器的高度控制仿真,给定 2 000 m 高度阶跃指令,高超飞行器高度跟踪曲线如图 4 所示,速度保持曲线如图 5 所示。 由图 4 可知,在高超飞行器高度控制的仿 真结果中,3 种算法得到的结果均无超调量;以 ESPIO 算法参数得到的结果调节时间最短,而 以 PSO 算法参数得到的结果调节时间最长。由 图 5 可知,在高度控制的同时进行速度保持控制, 3 种算法得到的结果均能使速度误差不超 过 0.045%,其中 ESPIO 算法参数得到的误差最小,其 值为 0.037%。而在 34 s 处,ESPIO 得到的结果具 有最高的误差,因为此时对应的高度控制具有最 快的收敛速度,由于高超飞行器飞/发一体化系统 各个通道的强耦合特性,其速度波动会更剧烈, 但速度波动的最大值不超过当前稳定速度的 0.01%。因此,以 ESPIO 优化得到的控制参数,在 高超飞行器飞/发一体化控制器参数整定方面有 最好的优化效果。 0 10 20 30 40 50 60 70 时间/s 2.00 2.02 2.04 2.06 2.08 2.10 2.12 2.14 2.16 2.18 2.20 高度/m ×104 高度变化 指令值 PSO PIO ESPIO 图 4 高度控制曲线 Fig. 4 Altitude control curve 0 10 20 30 40 50 60 70 时间/s 884.85 884.90 884.95 885.00 885.05 885.10 885.15 885.20 885.25 速度/m·s−1 速度变化 指令值 PSO PIO ESPIO 图 5 速度控制曲线 Fig. 5 Velocity control curve 5 结束语 1)本文针对高超飞行器飞/发一体化系统设 计了纵向控制器,包括升降舵通道的各个回路及 推力通道的速度回路及迎角回路,另外还包括发 动机的推力控制。最后对高度跟踪控制进行了仿 真,其结果表明所设计的控制器能够满足一定的 控制精度与稳定性。 2)本文所提出的 ESPIO 算法与基本 PIO、 PSO 相比具有更好的收敛性,通过对高超飞行器 飞/发一体化控制器参数整定并进行控制仿真,得 到仿真结果对比,其结果表明,本文所提出 ESPIO 算法在高超飞行器飞/发一体化控制器参数整 定方面有最好的优化效果,即在保持速度基本稳 定的同时,具有最好的高度控制性能。 参考文献: DING Yibo, WANG Xiaogang, BAI Yuliang, et al. An improved continuous sliding mode controller for flexible air-breathing hypersonic vehicle[J]. International journal of robust and nonlinear control, 2020, 30(14): 5751–5772. [1] WANG Le, QI Ruiyun, JIANG Bin. Adaptive actuator fault-tolerant control for non-minimum phase air-breath- [2] ·854· 智 能 系 统 学 报 第 17 卷