正在加载图片...
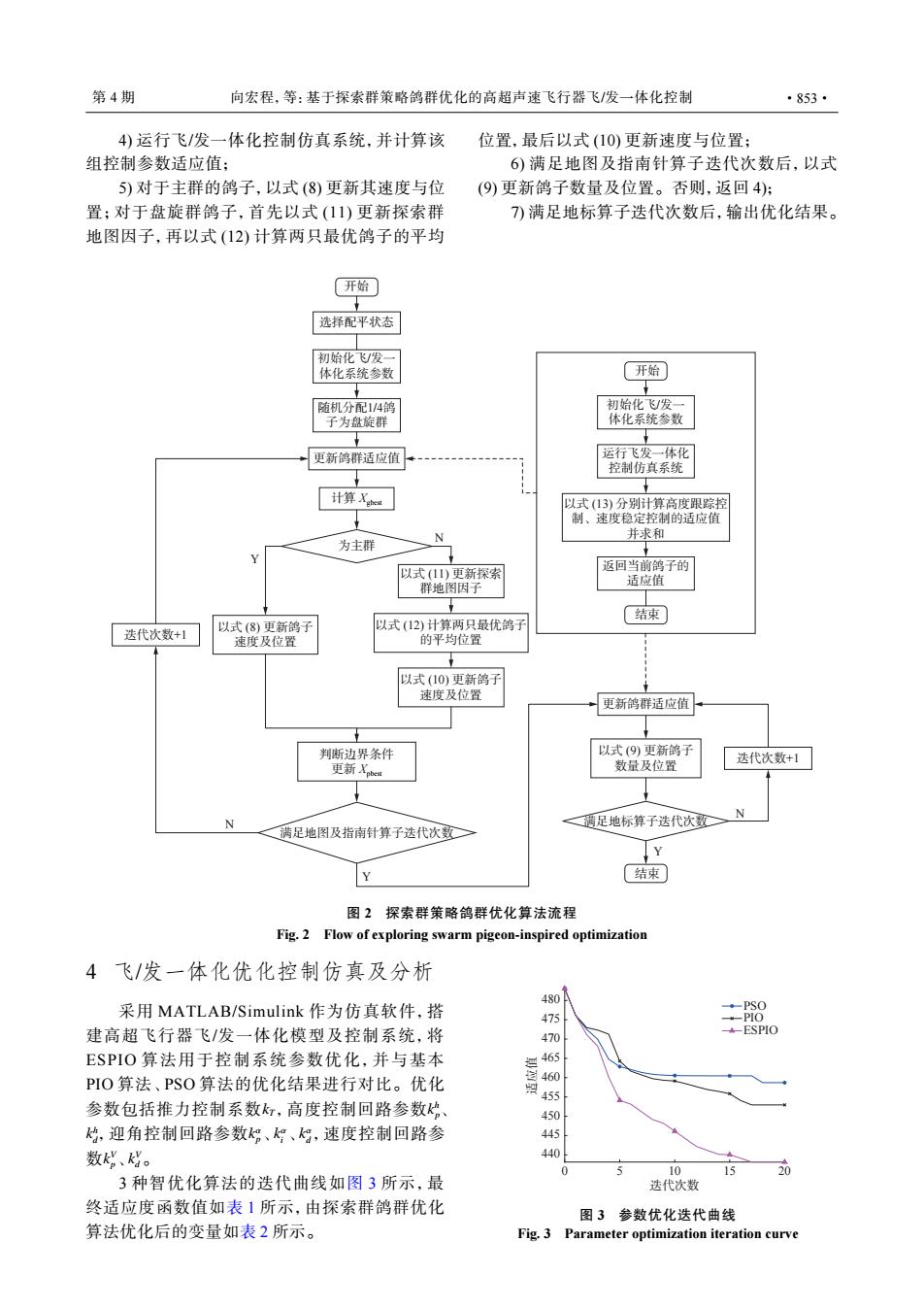
第4期 向宏程,等:基于探索群策略鸽群优化的高超声速飞行器飞/发一体化控制 ·853· 4)运行飞/发一体化控制仿真系统,并计算该 位置,最后以式(10)更新速度与位置: 组控制参数适应值; 6)满足地图及指南针算子迭代次数后,以式 5)对于主群的鸽子,以式(8)更新其速度与位 (9)更新鸽子数量及位置。否则,返回4): 置;对于盘旋群鸽子,首先以式(11)更新探索群 7满足地标算子迭代次数后,输出优化结果。 地图因子,再以式(12)计算两只最优鸽子的平均 开始 选择配平状态 初始化飞/发一 体化系统参数 开始 随机分配1/4鸽 初始化飞发一 子为盘旋群 体化系统参数 更新鸽群适应值 运行飞发一体化 控制仿真系统 计算Xea 以式(13)分别计算高度跟踪控 制、速度稳定控制的适应值 并求和 为主群 N 以式(11)更新探索 返回当前鸽子的 群地图因子 适应值 结束 迭代次数+1 以式(8)更新鸽子 以式(12)计算两只最优鸽子 速度及位置 的平均位置 以式(10)更新鸽子 速度及位置 更新鸽群适应值 判断边界条件 以式(9)更新鸽子 更新Xbea 数量及位置 选代次数+1 满足地标算子迭代次数 满足地图及指南针算子迭代次数一 Y Y 结束」 图2探索群策略鸽群优化算法流程 Fig.2 Flow of exploring swarm pigeon-inspired optimization 4飞/发一体化优化控制仿真及分析 4801 采用MATLAB/Simulink作为仿真软件,搭 475 建高超飞行器飞/发一体化模型及控制系统,将 470 ESPIO算法用于控制系统参数优化,并与基本 兰465 PIO算法、PSO算法的优化结果进行对比。优化 宫460 455 参数包括推力控制系数k,高度控制回路参数、 450 悠,迎角控制回路参数g、k、,速度控制回路参 445 数、 440 0 10 15 20 3种智优化算法的迭代曲线如图3所示,最 选代次数 终适应度函数值如表1所示,由探索群鸽群优化 图3参数优化迭代曲线 算法优化后的变量如表2所示。 Fig.3 Parameter optimization iteration curve4) 运行飞/发一体化控制仿真系统,并计算该 组控制参数适应值; 5) 对于主群的鸽子,以式 (8) 更新其速度与位 置;对于盘旋群鸽子,首先以式 (11) 更新探索群 地图因子,再以式 (12) 计算两只最优鸽子的平均 位置,最后以式 (10) 更新速度与位置; 6) 满足地图及指南针算子迭代次数后,以式 (9) 更新鸽子数量及位置。否则,返回 4); 7) 满足地标算子迭代次数后,输出优化结果。 开始 选择配平状态 结束 随机分配1/4鸽 子为盘旋群 计算 Xgbest 为主群 以式 (8) 更新鸽子 速度及位置 满足地图及指南针算子迭代次数 N Y 以式 (11) 更新探索 群地图因子 以式 (12) 计算两只最优鸽子 的平均位置 以式 (10) 更新鸽子 速度及位置 Y N 判断边界条件 更新 Xpbest 初始化飞/发一 体化系统参数 更新鸽群适应值 更新鸽群适应值 以式 (9) 更新鸽子 数量及位置 满足地标算子迭代次数 N Y 迭代次数+1 迭代次数+1 开始 运行飞发一体化 控制仿真系统 返回当前鸽子的 适应值 初始化飞/发一 体化系统参数 以式 (13) 分别计算高度跟踪控 制、速度稳定控制的适应值 并求和 结束 图 2 探索群策略鸽群优化算法流程 Fig. 2 Flow of exploring swarm pigeon-inspired optimization 4 飞/发一体化优化控制仿真及分析 kT k h p k h d k α p k α i k α d k V p k V d 采用 MATLAB/Simulink 作为仿真软件,搭 建高超飞行器飞/发一体化模型及控制系统,将 ESPIO 算法用于控制系统参数优化,并与基本 PIO 算法、PSO 算法的优化结果进行对比。优化 参数包括推力控制系数 ,高度控制回路参数 、 ,迎角控制回路参数 、 、 ,速度控制回路参 数 、 。 3 种智优化算法的迭代曲线如图 3 所示,最 终适应度函数值如表 1 所示,由探索群鸽群优化 算法优化后的变量如表 2 所示。 0 5 10 15 20 迭代次数 440 445 450 455 460 465 470 475 480 适应值 PSO PIO ESPIO 图 3 参数优化迭代曲线 Fig. 3 Parameter optimization iteration curve 第 4 期 向宏程,等:基于探索群策略鸽群优化的高超声速飞行器飞/发一体化控制 ·853·