正在加载图片...
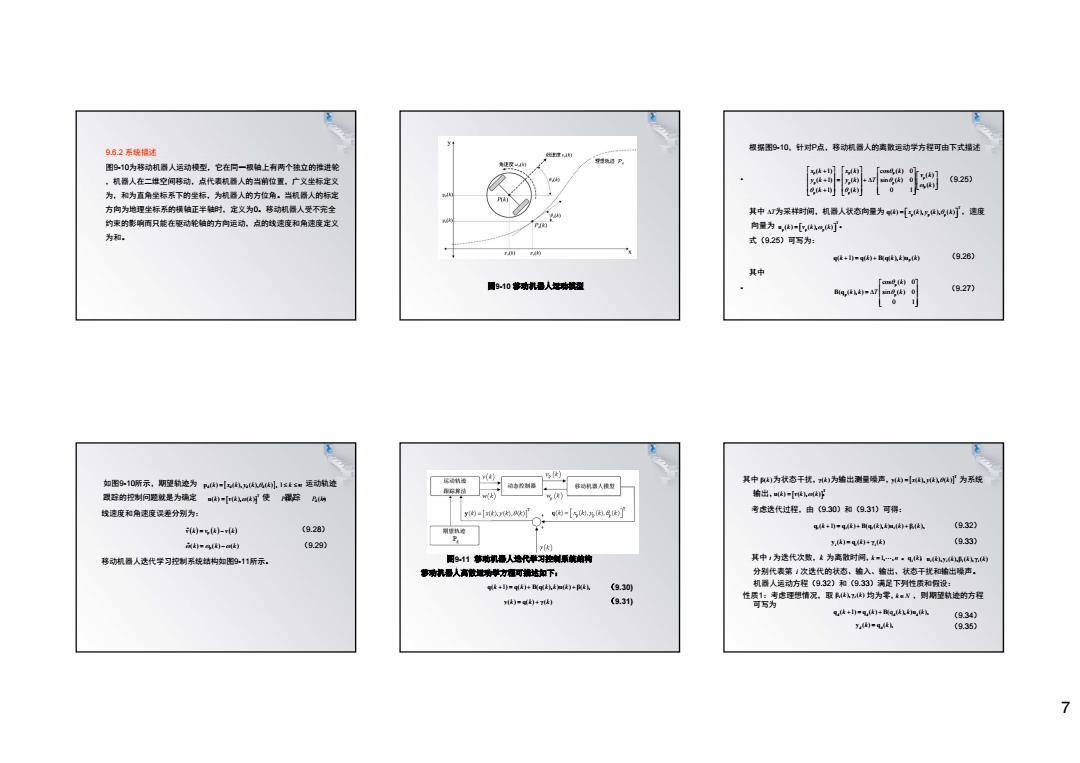
962系规槽述 极据图职10,针对P点,移动城器人的离敬运动学方程可由下式描选 9RP. 图910为移动机器人运动模型,它在同一极触上有两个独立的推进轮 ,机器人在二排空间移动,点代有机指人的当前位置。广义坐标定义 树 925 为,和为直角坐标系下的坐标,为机器人的方位角。当机器人的标定 方向为地理坐标采的横触正半触时,定文为0。移动机情人受不完全 其中A为采样时间,机器人获态向量为-5,心可,速度 约束的影响而只能在臣动轮轴的方向运动,点的线速度和角速度定义 向量为气,传一,· 为和 式(925)可写为: t+-)+倒甲,肉 (9.26) 其中 同910警动机最人视过 「m的门 (927) 如图910听示,期里轨迹为心心。1x上sm运动输迹 在动机器人横数 具中为状态干扰,)为缩出测量噪声,)国.,为系统 动态的制器 翠年的控制问避就是为确定出一kk开使诺弃男4 输出,-r好 线速度和角速度误差分别为: -[5,了 考虑选代过程.由(930)和(9.31)可得 )5- (9.28 q4k+-q+围4使+k使以 (9.32 ,4-到 (9.29) )=+) (9.33 移动机人选代学习控制系统轴构如图的11所示。 图丝行等南肌量人进代学习控响原球销物 其中,为选代次数,为离散时间,kl因因 事射讯最人高批方可辅站★下: 分别代表第次选代的状态,编入。输出、状态干找和输出噪声。 k+=+到军,k)+倒k (9.30 机器人运动方程(9.32)和(9.33)满足下列性质和假设: (9.3i 性质1:考虑旺想情况。取化%,均为零,k=N,则期亚轨迹的方程 可写为 见传+与=电+倒包国, (934) - (9.35) 77 9.6.2 系统描述 图9-10为移动机器人运动模型,它在同一根轴上有两个独立的推进轮 ,机器人在二维空间移动,点代表机器人的当前位置,广义坐标定义 为,和为直角坐标系下的坐标,为机器人的方位角。当机器人的标定 方向为地理坐标系的横轴正半轴时,定义为0。移动机器人受不完全 约束的影响而只能在驱动轮轴的方向运动,点的线速度和角速度定义 为和。 图9-10 移动机器人运动模型 根据图9-10,针对P点,移动机器人的离散运动学方程可由下式描述 • (9.25) 其中 为采样时间,机器人状态向量为 ,速度 向量为 。 式(9.25)可写为: (9.26) 其中 • (9.27) p p p p p p p p p p ( 1) ( ) cos ( ) 0 ( ) ( 1) ( ) sin ( ) 0 ( ) ( 1) ( ) 0 1 x k x k k v k y k y k T k k k k T T p p p ( ) ( ), ( ), ( ) k x k y k k q T p p p ( ) ( ), ( ) k v k k u p q q B q u ( 1) ( ) ( ( ), ) ( ) k k k k k p p p cos ( ) 0 ( ( ), ) sin ( ) 0 0 1 k k k T k B q 如图9-10所示,期望轨迹为 。运动轨迹 跟踪的控制问题就是为确定 ,使 跟踪 。 线速度和角速度误差分别为: (9.28) (9.29) 移动机器人迭代学习控制系统结构如图9-11所示。 pd d d d ( ) ( ), ( ), ( ) , 1 k x k y k k k n T u( ) ( ), ( ) k v k k P k( ) d P k( ) v k v k v k p p ( ) ( ) ( ) k k k 图9-11 移动机器人迭代学习控制系统结构 移动机器人离散运动学方程可描述如下: (9.30) (9.31) q q B q u ( 1) ( ) ( ( ), ) ( ) ( ), k k k k k k β y q ( ) ( ) ( ) k k k γ 其中 为状态干扰, 为输出测量噪声, 为系统 输出, 。 考虑迭代过程,由(9.30)和(9.31)可得: (9.32) (9.33) 其中 为迭代次数, 为离散时间, 。 , 分别代表第 次迭代的状态、输入、输出、状态干扰和输出噪声。 机器人运动方程(9.32)和(9.33)满足下列性质和假设: 性质1:考虑理想情况,取 均为零, ,则期望轨迹的方程 可写为 (9.34) (9.35) β( ) k γ( ) k T y( ) ( ), ( ), ( ) k x k y k k ( ) ( ), ( ) k v k k T u ( 1) ( ) ( ( ), ) ( ) ( ), i i i i i q q B q u β k k k k k k ( ) ( ) ( ) i i i y q γ k k k i k k n 1, , ( ) i q k ( ), ( ), ( ), ( ) i i i i u y β γ k k k k i ( ), ( ) i i β γ k k k N d d d d q q B u ( 1) ( ) (q ( ), ) ( ), k k k k k d d y q ( ) ( ), k k