正在加载图片...
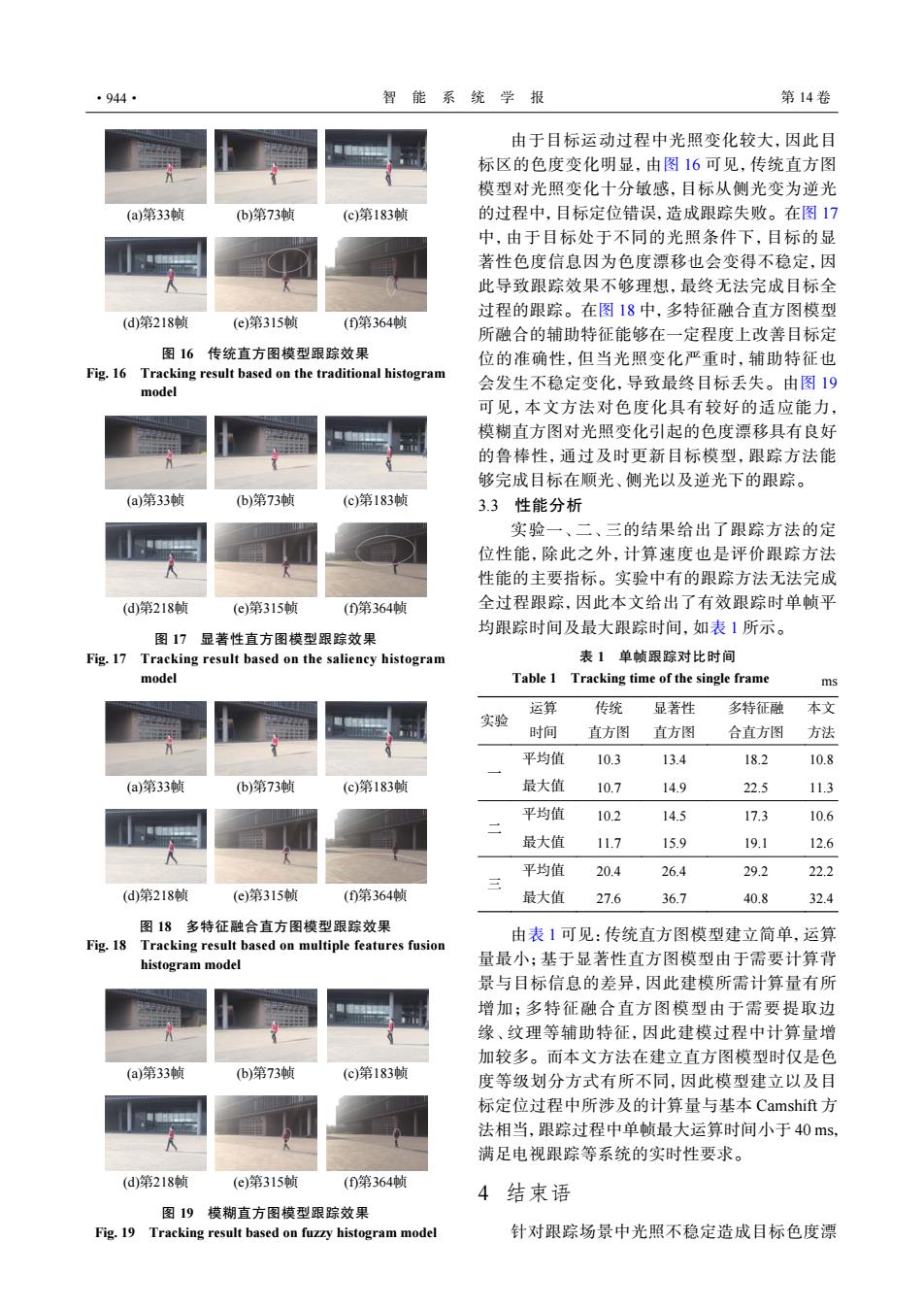
·944· 智能系统学报 第14卷 由于目标运动过程中光照变化较大,因此目 标区的色度变化明显,由图16可见,传统直方图 模型对光照变化十分敏感,目标从侧光变为逆光 (a)第33帧 (b)第73帧 (c)第183帧 的过程中,目标定位错误,造成跟踪失败。在图17 中,由于目标处于不同的光照条件下,目标的显 著性色度信息因为色度漂移也会变得不稳定,因 此导致跟踪效果不够理想,最终无法完成目标全 过程的跟踪。在图18中,多特征融合直方图模型 (d)第218帧 (e)第315帧 ()第364帧 所融合的辅助特征能够在一定程度上改善目标定 图16传统直方图模型跟踪效果 位的准确性,但当光照变化严重时,辅助特征也 Fig.16 Tracking result based on the traditional histogram model 会发生不稳定变化,导致最终目标丢失。由图19 可见,本文方法对色度化具有较好的适应能力, 模糊直方图对光照变化引起的色度漂移具有良好 的鲁棒性,通过及时更新目标模型,跟踪方法能 够完成目标在顺光、侧光以及逆光下的跟踪。 (a)第33帧 (b)第73帧 (c)第183帧 3.3性能分析 实验一、二、三的结果给出了跟踪方法的定 位性能,除此之外,计算速度也是评价跟踪方法 性能的主要指标。实验中有的跟踪方法无法完成 (d第218帧 (e)第315帧 ()第364帧 全过程跟踪,因此本文给出了有效跟踪时单帧平 均跟踪时间及最大跟踪时间,如表1所示。 图17显著性直方图模型跟踪效果 Fig.17 Tracking result based on the saliency histogram 表1单帧跟踪对比时间 model Table 1 Tracking time of the single frame ms 运算 传统 显著性 多特征融 本文 实验 时间 直方图 直方图 合直方图 方法 平均值 10.3 13.4 18.2 10.8 (a)第33帧 (b)第73帧 (c)第183帧 最大值 10.7 14.9 22.5 11.3 平均值 10.2 14.5 17.3 10.6 最大值 11.7 15.9 19.1 12.6 平均值 20.4 26.4 29.2 22.2 (d第218帧 (e)第315帧 ()第364帧 最大值 27.6 36.7 40.8 32.4 图18多特征融合直方图模型跟踪效果 Fig.18 Tracking result based on multiple features fusion 由表1可见:传统直方图模型建立简单,运算 histogram model 量最小;基于显著性直方图模型由于需要计算背 景与目标信息的差异,因此建模所需计算量有所 增加;多特征融合直方图模型由于需要提取边 缘、纹理等辅助特征,因此建模过程中计算量增 加较多。而本文方法在建立直方图模型时仅是色 (a)第33帧 (b)第73帧 (c)第183帧 度等级划分方式有所不同,因此模型建立以及目 标定位过程中所涉及的计算量与基本Camshift方 法相当,跟踪过程中单帧最大运算时间小于40ms, 满足电视跟踪等系统的实时性要求。 (d)第218帧 (e)第315帧 (f)第364帧 4结束语 图19模糊直方图模型跟踪效果 Fig.19 Tracking result based on fuzzy histogram model 针对跟踪场景中光照不稳定造成目标色度漂(a)第33帧 (b)第73帧 (c)第183帧 (d)第218帧 (e)第315帧 (f)第364帧 图 16 传统直方图模型跟踪效果 Fig. 16 Tracking result based on the traditional histogram model (a)第33帧 (b)第73帧 (c)第183帧 (d)第218帧 (e)第315帧 (f)第364帧 图 17 显著性直方图模型跟踪效果 Fig. 17 Tracking result based on the saliency histogram model (a)第33帧 (b)第73帧 (c)第183帧 (d)第218帧 (e)第315帧 (f)第364帧 图 18 多特征融合直方图模型跟踪效果 Fig. 18 Tracking result based on multiple features fusion histogram model (a)第33帧 (b)第73帧 (c)第183帧 (d)第218帧 (e)第315帧 (f)第364帧 图 19 模糊直方图模型跟踪效果 Fig. 19 Tracking result based on fuzzy histogram model 由于目标运动过程中光照变化较大,因此目 标区的色度变化明显,由图 16 可见,传统直方图 模型对光照变化十分敏感,目标从侧光变为逆光 的过程中,目标定位错误,造成跟踪失败。在图 17 中,由于目标处于不同的光照条件下,目标的显 著性色度信息因为色度漂移也会变得不稳定,因 此导致跟踪效果不够理想,最终无法完成目标全 过程的跟踪。在图 18 中,多特征融合直方图模型 所融合的辅助特征能够在一定程度上改善目标定 位的准确性,但当光照变化严重时,辅助特征也 会发生不稳定变化,导致最终目标丢失。由图 19 可见,本文方法对色度化具有较好的适应能力, 模糊直方图对光照变化引起的色度漂移具有良好 的鲁棒性,通过及时更新目标模型,跟踪方法能 够完成目标在顺光、侧光以及逆光下的跟踪。 3.3 性能分析 实验一、二、三的结果给出了跟踪方法的定 位性能,除此之外,计算速度也是评价跟踪方法 性能的主要指标。实验中有的跟踪方法无法完成 全过程跟踪,因此本文给出了有效跟踪时单帧平 均跟踪时间及最大跟踪时间,如表 1 所示。 表 1 单帧跟踪对比时间 Table 1 Tracking time of the single frame ms 实验 运算 时间 传统 直方图 显著性 直方图 多特征融 合直方图 本文 方法 一 平均值 10.3 13.4 18.2 10.8 最大值 10.7 14.9 22.5 11.3 二 平均值 10.2 14.5 17.3 10.6 最大值 11.7 15.9 19.1 12.6 三 平均值 20.4 26.4 29.2 22.2 最大值 27.6 36.7 40.8 32.4 由表 1 可见:传统直方图模型建立简单,运算 量最小;基于显著性直方图模型由于需要计算背 景与目标信息的差异,因此建模所需计算量有所 增加;多特征融合直方图模型由于需要提取边 缘、纹理等辅助特征,因此建模过程中计算量增 加较多。而本文方法在建立直方图模型时仅是色 度等级划分方式有所不同,因此模型建立以及目 标定位过程中所涉及的计算量与基本 Camshift 方 法相当,跟踪过程中单帧最大运算时间小于 40 ms, 满足电视跟踪等系统的实时性要求。 4 结束语 针对跟踪场景中光照不稳定造成目标色度漂 ·944· 智 能 系 统 学 报 第 14 卷