正在加载图片...
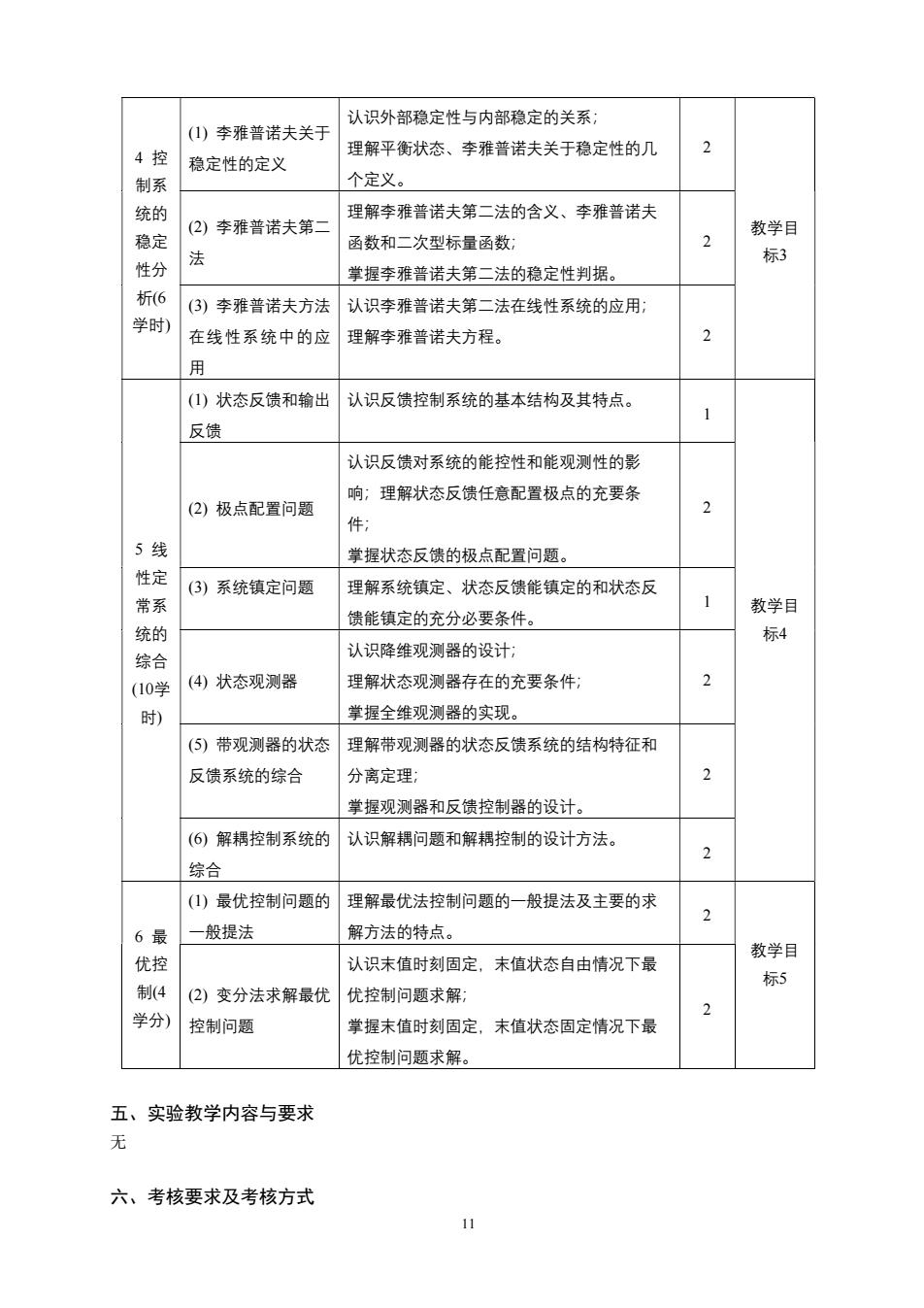
认识外部稳定性与内部稳定的关系 (1)李雅普诺夫关于 4控 稳定性的定义 理解平衡状态、李雅普诺夫关于稳定性的几 2 制系 个定义。 统 (2)李雅普诺夫第二 理解李雅普诺夫第二法的含义、李雅普诺夫 定 函数和二次型标量函数: 2 教学目 标3 性分 掌握李雅普诺夫第二法的稳定性判据。 析6 (3)李雅普诺夫方法 认识李雅普诺夫第二法在线性系统的应用: 学时) 在线性系统中的应 理解李雅普诺夫方程。 2 用 (1)状态反馈和输出 认识反馈控制系统的基本结构及其特点。 1 反馈 认识反馈对系统的能控性和能观测性的影 响:理解状态反馈任意配置极点的充要条 (2)极点配置问题 2 5线 掌挥状态反馈的极点配置问题。 性定 (3)系统镇定问题 理解系统镇定、状态反馈能镇定的和状态反 常系 1 馈能镇定的充分必要条件。 教学目 统的 标4 综合 认识降维观测器的设计 (10学 (4状态观测器 理解状态观测器存在的充要条件; 时) 掌握全维观测器的实现。 (⑤)带观测器的状态 理解带观测器的状态反馈系统的结构特征和 反馈系统的综合 分离定理 掌握观测器和反馈控制器的设计。 (6)解耦控制系统的 认识解耦问题和解耦控制的设计方法 2 综合 ()最优控制问题的 理解最优法控制问题的一般提法及主要的求 2 6最 一般提法 解方法的特点。 优控 认识未值时刻固定,未值状态自由情况下最 教学目 制(4 标5 (2)变分法求解最优 优控制问题求解, 学分)控制问题 2 掌握未值时刻固定。 未值状态固定情况下最 优控制问题求解, 五、实验教学内容与要求 六、考核要求及考核方式 11 4 控 制系 统的 稳定 性分 析(6 学时) (1) 李雅普诺夫关于 稳定性的定义 认识外部稳定性与内部稳定的关系; 理解平衡状态、李雅普诺夫关于稳定性的几 个定义。 2 教学目 标3 (2) 李雅普诺夫第二 法 理解李雅普诺夫第二法的含义、李雅普诺夫 函数和二次型标量函数; 掌握李雅普诺夫第二法的稳定性判据。 2 (3) 李雅普诺夫方法 在线性系统中的应 用 认识李雅普诺夫第二法在线性系统的应用; 理解李雅普诺夫方程。 2 5 线 性定 常系 统的 综合 (10学 时) (1) 状态反馈和输出 反馈 认识反馈控制系统的基本结构及其特点。 1 教学目 标4 (2) 极点配置问题 认识反馈对系统的能控性和能观测性的影 响;理解状态反馈任意配置极点的充要条 件; 掌握状态反馈的极点配置问题。 2 (3) 系统镇定问题 理解系统镇定、状态反馈能镇定的和状态反 馈能镇定的充分必要条件。 1 (4) 状态观测器 认识降维观测器的设计; 理解状态观测器存在的充要条件; 掌握全维观测器的实现。 2 (5) 带观测器的状态 反馈系统的综合 理解带观测器的状态反馈系统的结构特征和 分离定理; 掌握观测器和反馈控制器的设计。 2 (6) 解耦控制系统的 综合 认识解耦问题和解耦控制的设计方法。 2 6 最 优控 制(4 学分) (1) 最优控制问题的 一般提法 理解最优法控制问题的一般提法及主要的求 解方法的特点。 2 教学目 标5 (2) 变分法求解最优 控制问题 认识末值时刻固定,末值状态自由情况下最 优控制问题求解; 掌握末值时刻固定,末值状态固定情况下最 优控制问题求解。 2 五、实验教学内容与要求 无 六、考核要求及考核方式