正在加载图片...
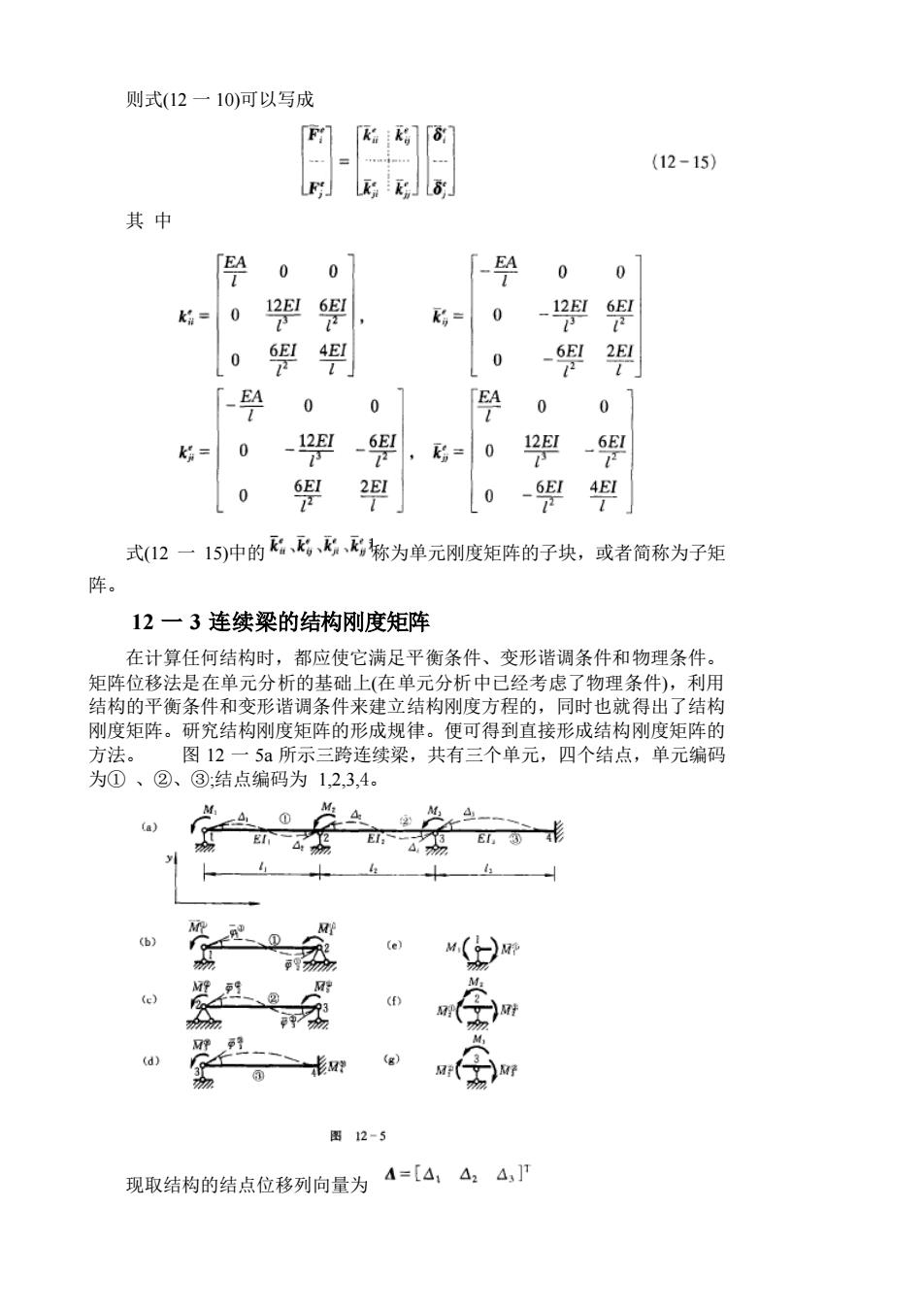
则式(12一10)可以写成 F][K]6 (12-15) FKGJ儿8 其中 伐 0 0 「EA 0 0 = 0 26g 0 0 -6 「4 0 0 母 0 0 k=0 -12型-6 形=0 2 -6E 架 2四 0 -6 式12一15中的飞系形称为单元刚度矩阵的子块,或者简称为子矩 阵。 12一3连续梁的结构刚度矩阵 在计算仟何结构时,都应使它满足平衡条件、变形谐调条件和物理条件 矩阵位移法是在单元分析的基础上(在 单 元分析中已经考虑了物理条件) 利用 结构的平衡条件和变形谐调条件来建立结构刚度方程的,同时也就得出了结构 刚度矩阵。研究结构刚度矩阵的形成规律。便可得到直接形成结构刚度矩阵的 方法。图12一5所示三跨连续梁,共有三个单元,四个结点,单元编码 为①、②、③:结点编码为1,2,3,4。 a) 44 (e) M. te) (d) 图2-5 现取结构的结点位移列向量为4=[4,4,4,广则式(12 一 10)可以写成 其 中 式(12 一 15)中的 称为单元刚度矩阵的子块,或者简称为子矩 阵。 12 一 3 连续梁的结构刚度矩阵 在计算任何结构时,都应使它满足平衡条件、变形谐调条件和物理条件。 矩阵位移法是在单元分析的基础上(在单元分析中已经考虑了物理条件),利用 结构的平衡条件和变形谐调条件来建立结构刚度方程的,同时也就得出了结构 刚度矩阵。研究结构刚度矩阵的形成规律。便可得到直接形成结构刚度矩阵的 方法。 图 12 一 5a 所示三跨连续梁,共有三个单元,四个结点,单元编码 为① 、②、③;结点编码为 1,2,3,4。 现取结构的结点位移列向量为