正在加载图片...
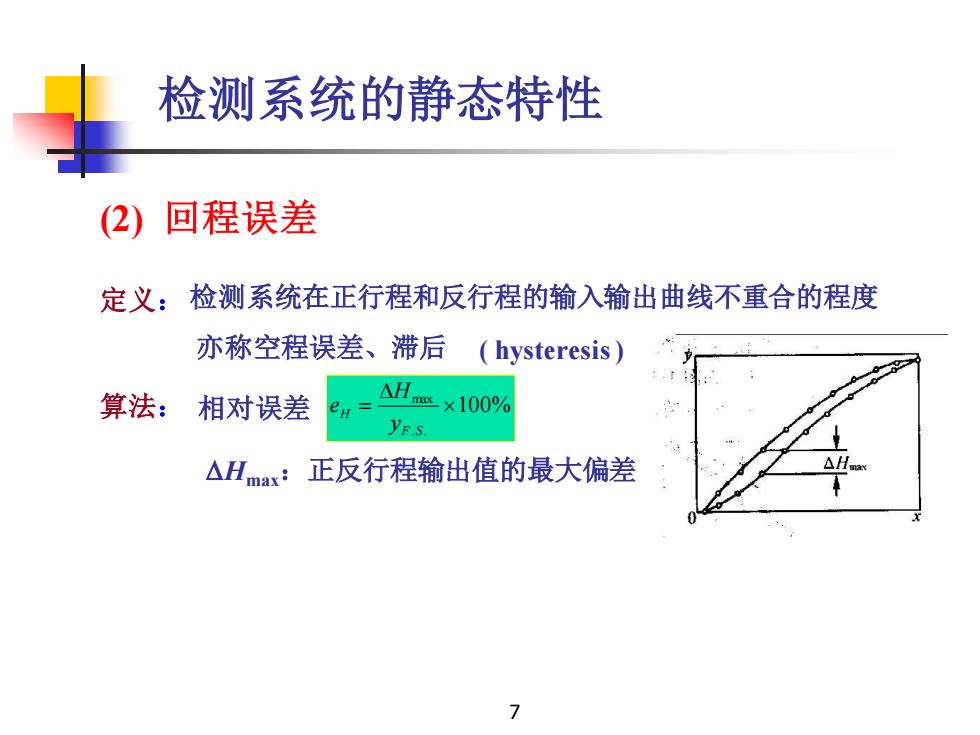
检测系统的静态特性 (2) 回程误差 定义:检测系统在正行程和反行程的输入输出曲线不重合的程度 亦称空程误差、滞后 (hysteresis) 算法: 相对误差 H Hs×100% yF.s. △Hmar:正反行程输出值的最大偏差 7 7 检测系统的静态特性 (2) 回程误差 检测系统在正行程和反行程的输入输出曲线不重合的程度 相对误差 100% . . max = F S H y H e Hmax:正反行程输出值的最大偏差 定义: 亦称空程误差、滞后 ( hysteresis ) 算法: