正在加载图片...
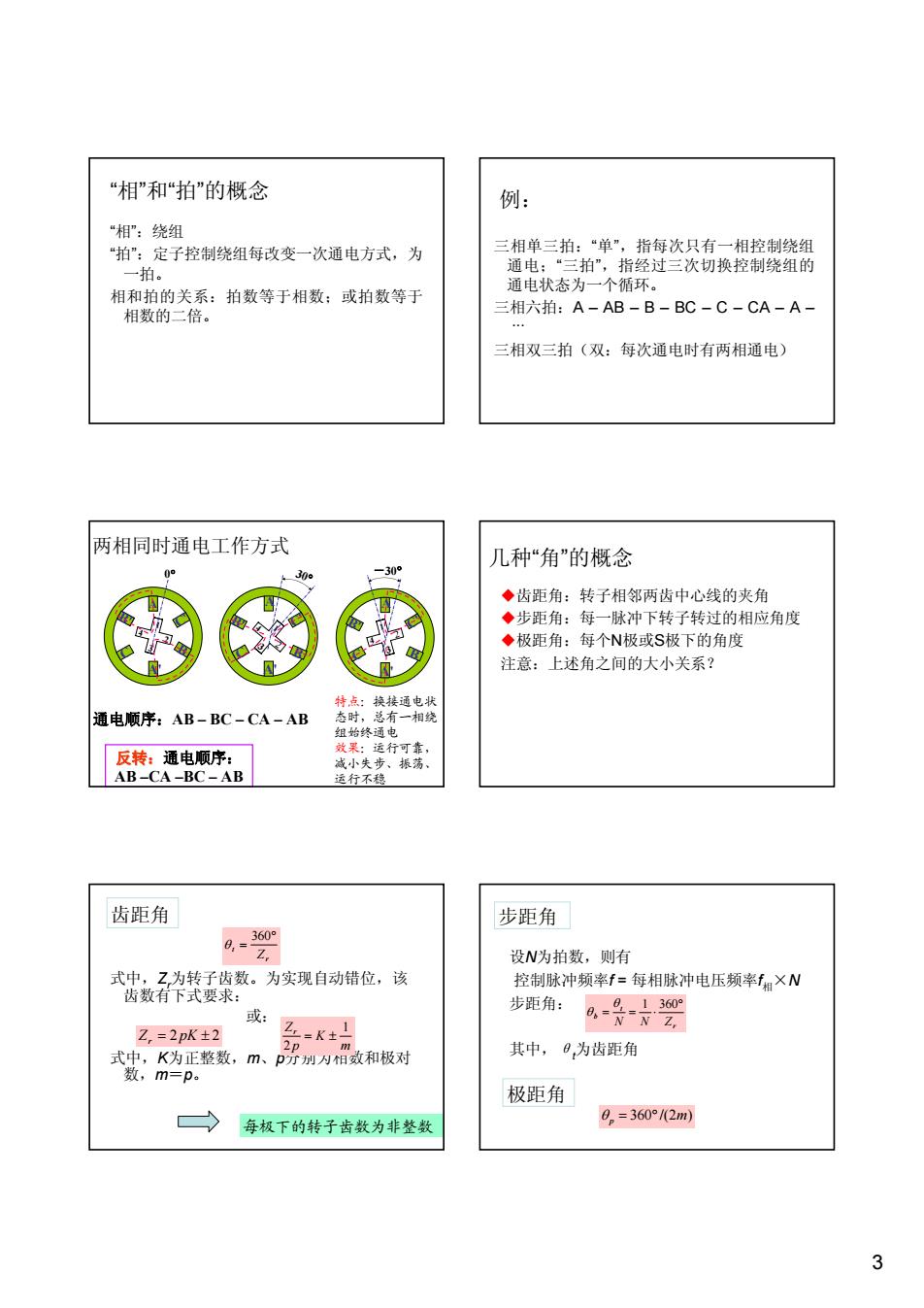
“相”和“拍”的概念 例: “相”:绕组 “拍”:定子控制绕组每改变一次通电方式,为 三相单三拍:“单”,指每次只有一相控制绕组 一拍。 通电:“三拍”,指经过三次切换控制绕组的 相和拍的关系:拍数等于相数:或拍数等于 通电状态为一个循环。 相数的二倍。 三相六拍:A-AB-B-BC-C-CA-A- 三相双三拍(双:每次通电时有两相通电) 两相同时通电工作方式 几种“角”的概念 0° 30 -30° ◆齿距角:转子相邻两齿中心线的夹角 ◆步距角:每一脉冲下转子转过的相应角度 ◆极距角:每个N极或S极下的角度 注意:上述角之间的大小关系? 特点:换接通电状 通电顺序:AB-BC-CA-AB 态时,总有一相绕 组始终通电 反转:通电顺序: 效果:运行可靠, 减小失步、振荡、 AB-CA-BC-AB 运行不稳 齿距角 步距角 360° 6,= Z. 设N为拍数,则有 式中,Z为转子齿数。为实现自动错位,该 控制脉冲频率f=每相脉冲电压频率f相×N 齿数有下式要求: 步距角: 或: Z,=2pkK±2 名=K士是 层片罗 2p 71 式中,K为正整数,m、p分别为阳数和极对 其中,日,为齿距角 数,m=p。 极距角 每极下的转子齿数为非整数 0。=360°/2m) 33 “相”和“拍”的概念 “相”:绕组 “拍”:定子控制绕组每改变一次通电方式,为 一拍。 相和拍的关系:拍数等于相数;或拍数等于 相数的二倍。 例: 三相单三拍:“单”,指每次只有一相控制绕组 通电;“三拍”,指经过三次切换控制绕组的 通电状态为一个循环。 三相六拍:A – AB – B – BC – C – CA – A – ··· 三相双三拍(双:每次通电时有两相通电) 通电顺序:AB – BC – CA – AB 反转:通电顺序: AB –CA –BC – AB A A' B C C' 1 2 3 4 B' A' B' C B C' 3 4 1 2 A 0° 30° A' B' C B C' 3 4 1 2 A -30° 两相同时通电工作方式 特点:换接通电状 态时,总有一相绕 组始终通电 效果:运行可靠, 减小失步、振荡、 运行不稳 几种“角”的概念 齿距角:转子相邻两齿中心线的夹角 步距角:每一脉冲下转子转过的相应角度 极距角:每个N极或S极下的角度 注意:上述角之间的大小关系? 齿距角 式中,Zr 为转子齿数。为实现自动错位,该 齿数有下式要求: 或: 式中,K为正整数,m、p分别为相数和极对 数,m=p。 r t Z ° = 360 θ Zr = 2 pK ± 2 m K p Zr 1 2 = ± 每极下的转子齿数为非整数 步距角 设N为拍数,则有 控制脉冲频率f = 每相脉冲电压频率f 相×N 步距角: 其中,θt 为齿距角 r t b N N Z ° = = ⋅ θ 1 360 θ 极距角 360 /(2 ) θ p = ° m