正在加载图片...
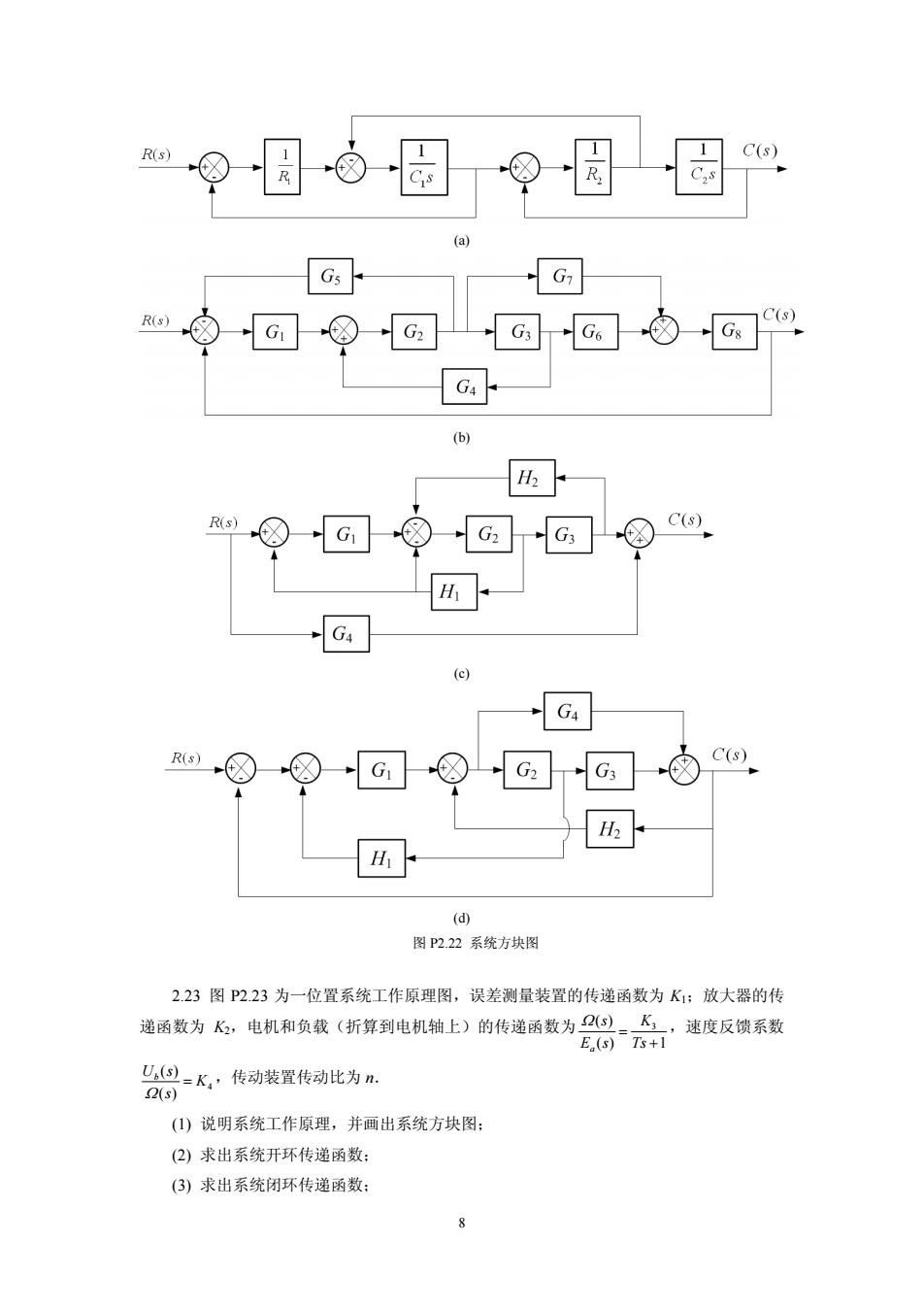
R(s) 1 C(s) (a) Gs G1 R(s) G4 (b) H2 R(s) G G3 C(s) H G4 (c) G4 C(s) H2 H (d) 图P2.22系统方块图 2.23图P2.23为一位置系统工作原理图,误差测量装置的传递函数为K1:放大器的传 递函数为2,电机和负载(折算到电机轴上)的传递函数为2()=K,,速度反馈系数 E(s)Ts+1 。⑨=K,传动装置传动比为m. 2(s) (1)说明系统工作原理,并画出系统方块图: (2)求出系统开环传递函数: (3)求出系统闭环传递函数:8 (a) (b) (c) (d) 图 P2.22 系统方块图 2.23 图 P2.23 为一位置系统工作原理图,误差测量装置的传递函数为 K1;放大器的传 递函数为 K2,电机和负载(折算到电机轴上)的传递函数为 3 ( ) () 1 a s K E s Ts Ω = + ,速度反馈系数 4 ( ) ( ) U s b K Ω s = ,传动装置传动比为 n. (1) 说明系统工作原理,并画出系统方块图; (2) 求出系统开环传递函数; (3) 求出系统闭环传递函数;