点击下载:长春工业大学:工程训练中心(PPT课件讲稿)ABB机器人手动操作教学实训
正在加载图片...
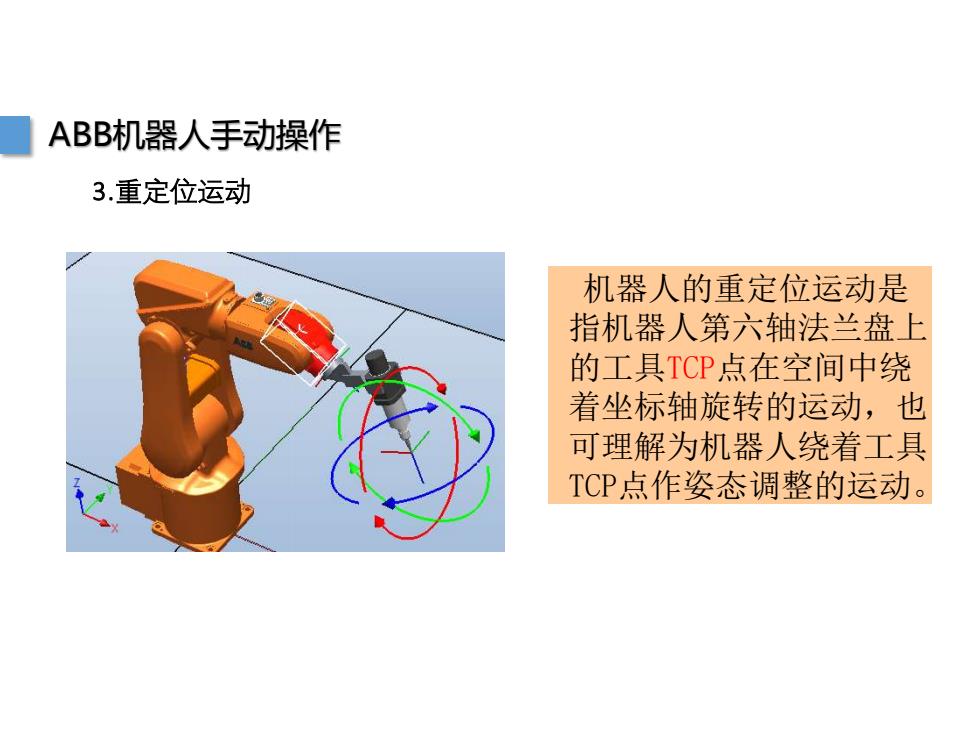
ABB机器人手动操作 3.重定位运动 机器人的重定位运动是 指机器人第六轴法兰盘上 的工具TCP点在空间中绕 着坐标轴旋转的运动,也 可理解为机器人绕着工具 TCP点作姿态调整的运动。 机器人的重定位运动是 指机器人第六轴法兰盘上 的工具TCP点在空间中绕 着坐标轴旋转的运动,也 可理解为机器人绕着工具 TCP点作姿态调整的运动。 ABB机器人手动操作 3.重定位运动
<<向上翻页
向下翻页>>
点击下载:长春工业大学:工程训练中心(PPT课件讲稿)ABB机器人手动操作教学实训
©2008-现在 cucdc.com 高等教育资讯网 版权所有