正在加载图片...
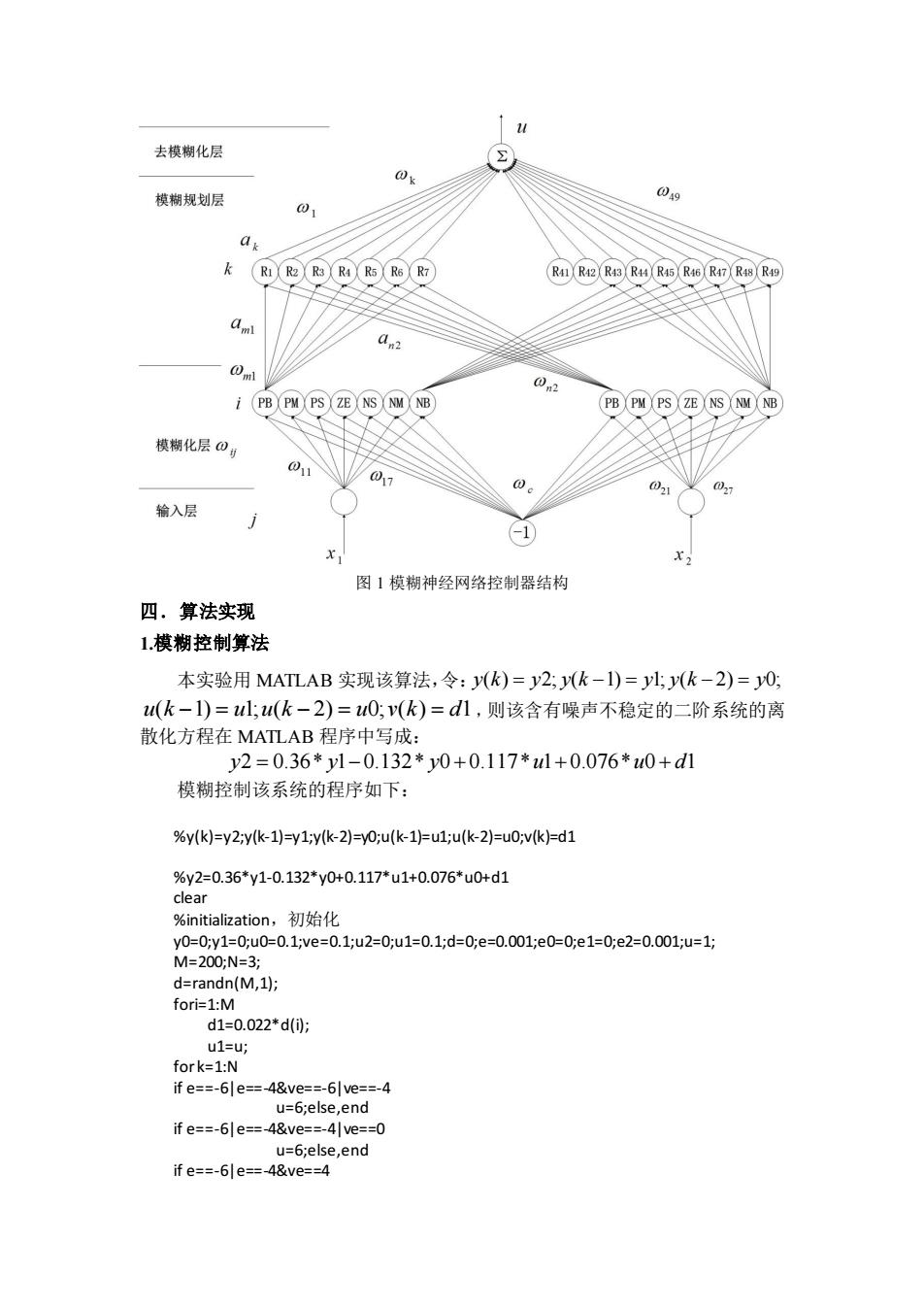
去模糊化层 @k 模糊规划层 09 0 ak (RIR2 R3 R4Rs R6R7 RIR42R43R4R45R46R47R48R49 am an2 Omi 02 i(PB PM PS ZE NS NM NB) (PBPM PS ZENS NM NB 模糊化层0) 011 01 021 07 输入层 图1模糊神经网络控制器结构 四.算法实现 1模糊控制算法 本实验用MATLAB实现该算法,令:y(k)=y2,y(k-1)=yl,y(k-2)=y0; u(k-1)=l;u(k-2)=u0:v(k)=d1,则该含有噪声不稳定的二阶系统的离 散化方程在MATLAB程序中写成: y2=0.36*y1-0.132*y0+0.117*ul+0.076*0+d1 模糊控制该系统的程序如下: %y(k)=y2iyk-1)=y1;yk-2)=y0:u(k-1=u1;u(k-2)=u0v(k)=d1 %y2=0.36*y1-0.132*y0+0.117*u1+0.076*u0+d1 clear %initialization,初始化 y0=0y1=0;u0=0.1ve=0.1;u2=0;u1=0.1;d=0;e=0.001;e0=0;e1=0;e2=0.001;u=1; M=200;N=3; d=randn(M,1); fori=1:M d1=0.022*d(0; u1=u; fork=1:N ife=-6e=-4&ve==-6lve=-4 u=6;else,end ife==-6le=-4&ve==-4|ve==0 u=6;else,end if e==-6|e==-4&ve==4图 1 模糊神经网络控制器结构 四.算法实现 1.模糊控制算法 本实验用 MATLAB 实现该算法,令:y k y y k y y k y ( ) 2; ( 1) 1; ( 2) 0; = − = − = u k u u k u v k d ( 1) 1; ( 2) 0; ( ) 1 − = − = = ,则该含有噪声不稳定的二阶系统的离 散化方程在 MATLAB 程序中写成: y y y u u d 2 0.36* 1 0.132* 0 0.117* 1 0.076* 0 1 = − + + + 模糊控制该系统的程序如下: %y(k)=y2;y(k-1)=y1;y(k-2)=y0;u(k-1)=u1;u(k-2)=u0;v(k)=d1 %y2=0.36*y1-0.132*y0+0.117*u1+0.076*u0+d1 clear %initialization,初始化 y0=0;y1=0;u0=0.1;ve=0.1;u2=0;u1=0.1;d=0;e=0.001;e0=0;e1=0;e2=0.001;u=1; M=200;N=3; d=randn(M,1); fori=1:M d1=0.022*d(i); u1=u; for k=1:N if e==-6|e==-4&ve==-6|ve==-4 u=6;else,end if e==-6|e==-4&ve==-4|ve==0 u=6;else,end if e==-6|e==-4&ve==4