正在加载图片...
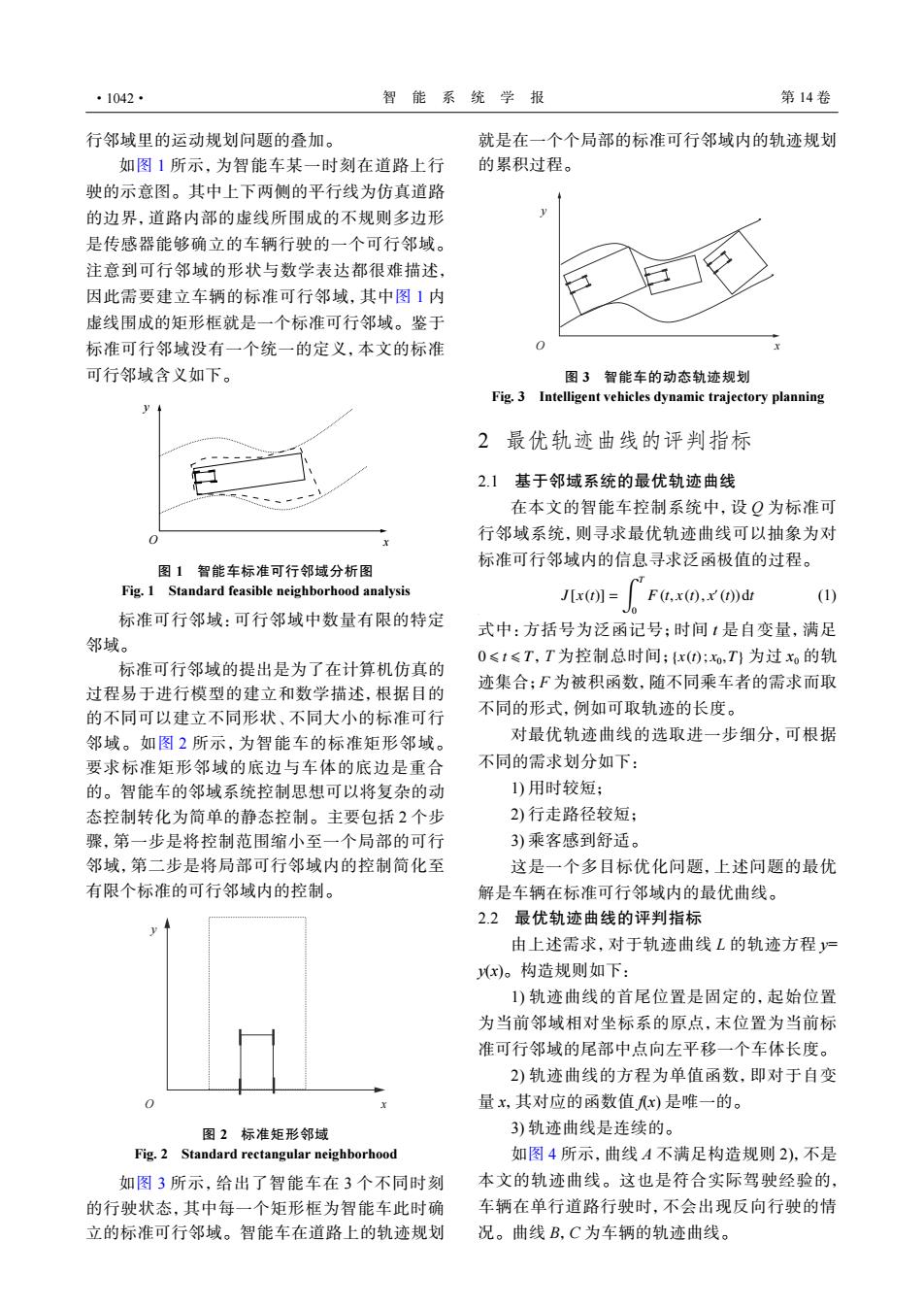
·1042· 智能系统学报 第14卷 行邻域里的运动规划问题的叠加。 就是在一个个局部的标准可行邻域内的轨迹规划 如图1所示,为智能车某一时刻在道路上行 的累积过程。 驶的示意图。其中上下两侧的平行线为仿真道路 的边界,道路内部的虚线所围成的不规则多边形 是传感器能够确立的车辆行驶的一个可行邻域。 注意到可行邻域的形状与数学表达都很难描述, 因此需要建立车辆的标准可行邻域,其中图1内 虚线围成的矩形框就是一个标准可行邻域。鉴于 标准可行邻域没有一个统一的定义,本文的标准 可行邻域含义如下。 图3智能车的动态轨迹规划 Fig.3 Intelligent vehicles dynamic trajectory planning 2最优轨迹曲线的评判指标 2.1基于邻域系统的最优轨迹曲线 在本文的智能车控制系统中,设Q为标准可 行邻域系统,则寻求最优轨迹曲线可以抽象为对 标准可行邻域内的信息寻求泛函极值的过程。 图1智能车标准可行邻域分析图 Fig.1 Standard feasible neighborhood analysis J[x(t】]= F.x(.xd (1) 标准可行邻域:可行邻域中数量有限的特定 式中:方括号为泛函记号;时间1是自变量,满足 邻域。 0≤t≤T,T为控制总时间;x(①;o,T}为过xo的轨 标准可行邻域的提出是为了在计算机仿真的 迹集合;F为被积函数,随不同乘车者的需求而取 过程易于进行模型的建立和数学描述,根据目的 的不同可以建立不同形状、不同大小的标准可行 不同的形式,例如可取轨迹的长度。 邻域。如图2所示,为智能车的标准矩形邻域。 对最优轨迹曲线的选取进一步细分,可根据 要求标准矩形邻域的底边与车体的底边是重合 不同的需求划分如下: 的。智能车的邻域系统控制思想可以将复杂的动 1)用时较短; 态控制转化为简单的静态控制。主要包括2个步 2)行走路径较短; 骤,第一步是将控制范围缩小至一个局部的可行 3)乘客感到舒适。 邻域,第二步是将局部可行邻域内的控制简化至 这是一个多目标优化问题,上述问题的最优 有限个标准的可行邻域内的控制。 解是车辆在标准可行邻域内的最优曲线。 2.2最优轨迹曲线的评判指标 由上述需求,对于轨迹曲线L的轨迹方程= x)。构造规则如下: 1)轨迹曲线的首尾位置是固定的,起始位置 为当前邻域相对坐标系的原点,末位置为当前标 准可行邻域的尾部中点向左平移一个车体长度。 2)轨迹曲线的方程为单值函数,即对于自变 0 量x,其对应的函数值x)是唯一的。 图2标准矩形邻域 3)轨迹曲线是连续的。 Fig.2 Standard rectangular neighborhood 如图4所示,曲线A不满足构造规则2),不是 如图3所示,给出了智能车在3个不同时刻 本文的轨迹曲线。这也是符合实际驾驶经验的, 的行驶状态,其中每一个矩形框为智能车此时确 车辆在单行道路行驶时,不会出现反向行驶的情 立的标准可行邻域。智能车在道路上的轨迹规划 况。曲线B,C为车辆的轨迹曲线。行邻域里的运动规划问题的叠加。 如图 1 所示,为智能车某一时刻在道路上行 驶的示意图。其中上下两侧的平行线为仿真道路 的边界,道路内部的虚线所围成的不规则多边形 是传感器能够确立的车辆行驶的一个可行邻域。 注意到可行邻域的形状与数学表达都很难描述, 因此需要建立车辆的标准可行邻域,其中图 1 内 虚线围成的矩形框就是一个标准可行邻域。鉴于 标准可行邻域没有一个统一的定义,本文的标准 可行邻域含义如下。 O x y 图 1 智能车标准可行邻域分析图 Fig. 1 Standard feasible neighborhood analysis 标准可行邻域:可行邻域中数量有限的特定 邻域。 标准可行邻域的提出是为了在计算机仿真的 过程易于进行模型的建立和数学描述,根据目的 的不同可以建立不同形状、不同大小的标准可行 邻域。如图 2 所示,为智能车的标准矩形邻域。 要求标准矩形邻域的底边与车体的底边是重合 的。智能车的邻域系统控制思想可以将复杂的动 态控制转化为简单的静态控制。主要包括 2 个步 骤,第一步是将控制范围缩小至一个局部的可行 邻域,第二步是将局部可行邻域内的控制简化至 有限个标准的可行邻域内的控制。 O x y 图 2 标准矩形邻域 Fig. 2 Standard rectangular neighborhood 如图 3 所示,给出了智能车在 3 个不同时刻 的行驶状态,其中每一个矩形框为智能车此时确 立的标准可行邻域。智能车在道路上的轨迹规划 就是在一个个局部的标准可行邻域内的轨迹规划 的累积过程。 O x y 图 3 智能车的动态轨迹规划 Fig. 3 Intelligent vehicles dynamic trajectory planning 2 最优轨迹曲线的评判指标 2.1 基于邻域系统的最优轨迹曲线 在本文的智能车控制系统中,设 Q 为标准可 行邻域系统,则寻求最优轨迹曲线可以抽象为对 标准可行邻域内的信息寻求泛函极值的过程。 J [x (t)] = ∫ T 0 F (t, x (t), x ′ (t))dt (1) 0 ⩽ t ⩽ T {x (t); x0,T} 式中:方括号为泛函记号;时间 t 是自变量,满足 ,T 为控制总时间; 为过 x0 的轨 迹集合;F 为被积函数,随不同乘车者的需求而取 不同的形式,例如可取轨迹的长度。 对最优轨迹曲线的选取进一步细分,可根据 不同的需求划分如下: 1) 用时较短; 2) 行走路径较短; 3) 乘客感到舒适。 这是一个多目标优化问题,上述问题的最优 解是车辆在标准可行邻域内的最优曲线。 2.2 最优轨迹曲线的评判指标 由上述需求,对于轨迹曲线 L 的轨迹方程 y= y(x)。构造规则如下: 1) 轨迹曲线的首尾位置是固定的,起始位置 为当前邻域相对坐标系的原点,末位置为当前标 准可行邻域的尾部中点向左平移一个车体长度。 2) 轨迹曲线的方程为单值函数,即对于自变 量 x,其对应的函数值 f(x) 是唯一的。 3) 轨迹曲线是连续的。 如图 4 所示,曲线 A 不满足构造规则 2),不是 本文的轨迹曲线。这也是符合实际驾驶经验的, 车辆在单行道路行驶时,不会出现反向行驶的情 况。曲线 B,C 为车辆的轨迹曲线。 ·1042· 智 能 系 统 学 报 第 14 卷