正在加载图片...
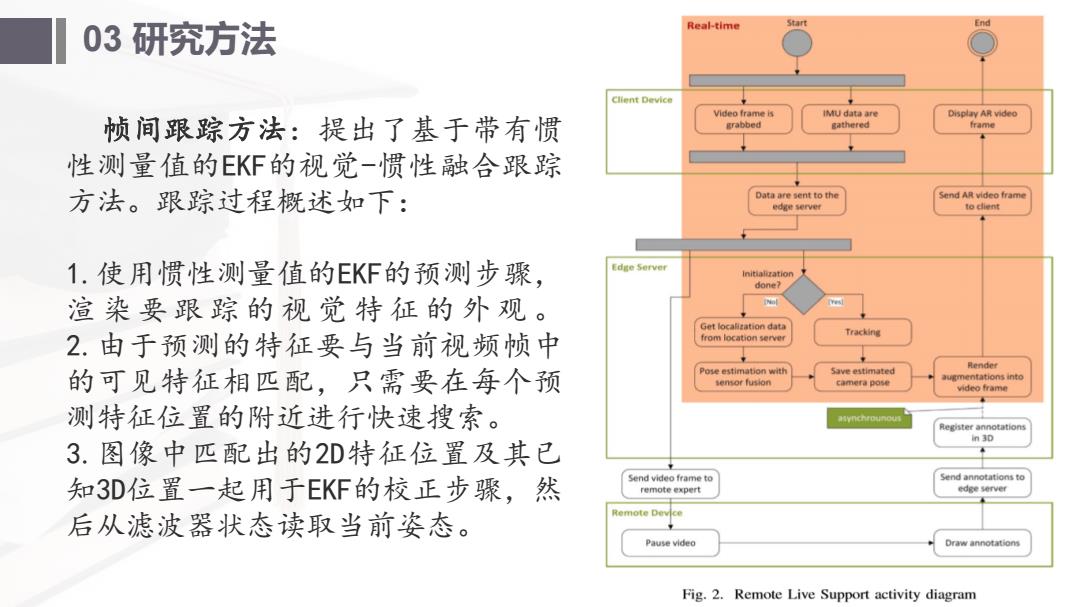
03研究方法 Real-time Client Device Video frame is IMU data are Display AR video 颅间跟踪方法:提出了基于带有惯 grabbed gathered frame 性测量值的EKF的视觉-惯性融合跟踪 方法。跟踪过程概述如下: Data are sent to the Send AR video frame edge serve时 to elient 1.使用惯性测量值的EKF的预测步骤, Edge Server Initialation done? 渲染要跟踪的视觉特征的外观。 西 Get localization data 2.由于预测的特征要与当前视频帧中 from location server Tracking Render 的可见特征相匹配,只需要在每个预 Pose estimation with Save estimated sensor fusion camera pose ¥4de0rann 测特征位置的附近进行快速搜索。 Register annotation n30 3.图像中匹配出的2D特征位置及其已 知3D位置一起用于EKF的校正步骤,然 Send video frame to Send annotations to remote expert edge server Remote Device 后从滤波器状态读取当前姿态。 Pause video Fig.2.Remote Live Support activity diagram03 研究方法 帧间跟踪方法:提出了基于带有惯 性测量值的EKF的视觉-惯性融合跟踪 方法。跟踪过程概述如下: 1.使用惯性测量值的EKF的预测步骤, 渲 染 要 跟 踪 的 视 觉 特 征 的 外 观 。 2.由于预测的特征要与当前视频帧中 的可见特征相匹配,只需要在每个预 测特征位置的附近进行快速搜索。 3.图像中匹配出的2D特征位置及其已 知3D位置一起用于EKF的校正步骤,然 后从滤波器状态读取当前姿态