点击下载:兰州交通大学:《数控机床及其应用》课程PPT教学课件(2015)第四讲 速度计算
正在加载图片...
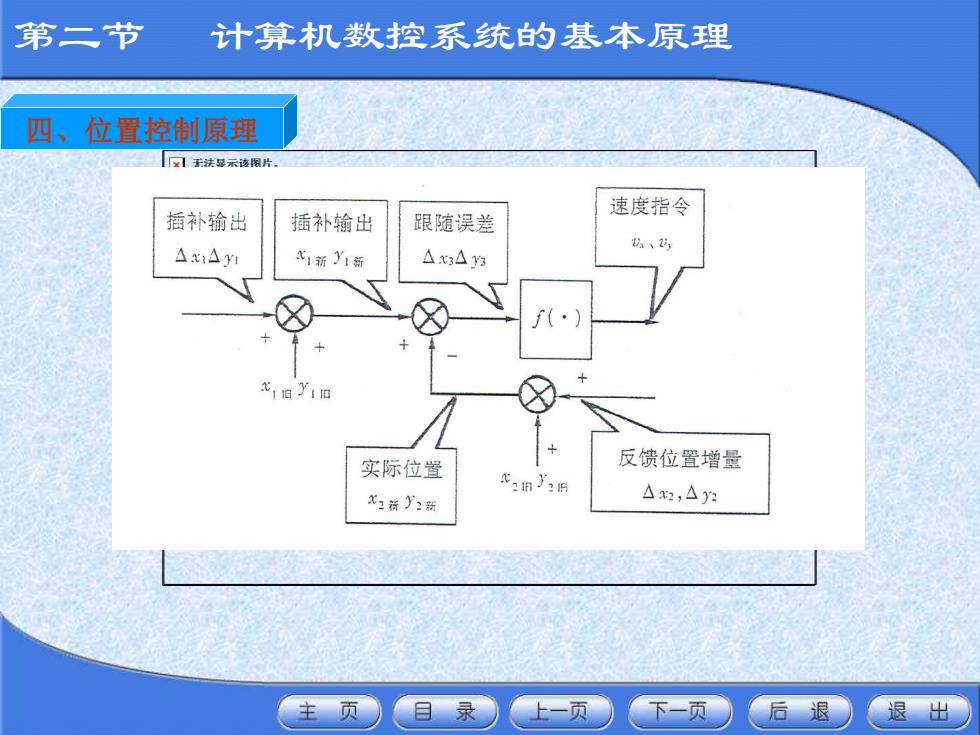
第二节 计算机数控系统的基本原理 四、位置控制原理 手法品示速保片 速度指令 插补输出 插补输出 跟随误差 △x1△y1 以、2 1新当新 △3△3 f(·】 1旧y1▣ 实际位置 反馈位置增量 2iny3R 无1衍2新 △x,△y2 主页 目录 上一页 下一页 后退 退出四、位置控制原理 第二节 计算机数控系统的基本原理
<<向上翻页
向下翻页>>
点击下载:兰州交通大学:《数控机床及其应用》课程PPT教学课件(2015)第四讲 速度计算
©2008-现在 cucdc.com 高等教育资讯网 版权所有