正在加载图片...
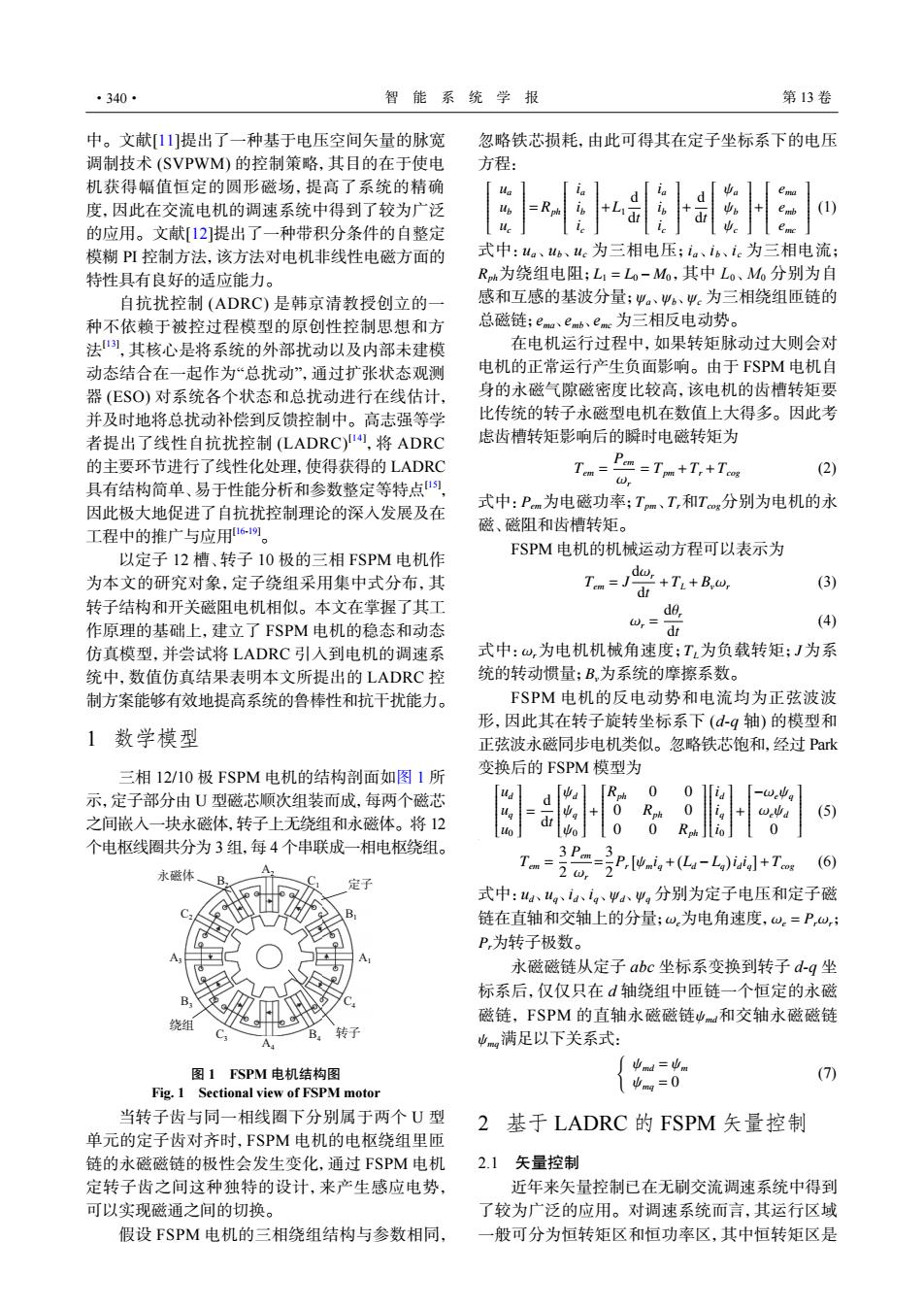
·340· 智能系统学报 第13卷 中。文献[11]提出了一种基于电压空间矢量的脉宽 忽略铁芯损耗,由此可得其在定子坐标系下的电压 调制技术(SVPWM)的控制策略,其目的在于使电 方程: 机获得幅值恒定的圆形磁场,提高了系统的精确 Ma ia d ema 度,因此在交流电机的调速系统中得到了较为广泛 =R d (1) 的应用。文献[12]提出了一种带积分条件的自整定 山。 e 模糊PI控制方法,该方法对电机非线性电磁方面的 式中:ua、ub、4e为三相电压;ia、i6、ic为三相电流; 特性具有良好的适应能力。 Rh为绕组电阻;L=Lo-Mo,其中Lo、M分别为自 自抗扰控制(ADRC)是韩京清教授创立的 一 感和互感的基波分量;y、、4。为三相绕组匝链的 种不依赖于被控过程模型的原创性控制思想和方 总磁链;em、eb、em为三相反电动势。 法,其核心是将系统的外部扰动以及内部未建模 在电机运行过程中,如果转矩脉动过大则会对 动态结合在一起作为“总扰动”,通过扩张状态观测 电机的正常运行产生负面影响。由于FSPM电机自 器(E$O)对系统各个状态和总扰动进行在线估计, 身的永磁气隙磁密度比较高,该电机的齿槽转矩要 并及时地将总扰动补偿到反馈控制中。高志强等学 比传统的转子永磁型电机在数值上大得多。因此考 者提出了线性自抗扰控制(LADRC),将ADRC 虑齿槽转矩影响后的瞬时电磁转矩为 的主要环节进行了线性化处理,使得获得的LADRC Tm-Pe-TtT,+Tor (2) 具有结构简单、易于性能分析和参数整定等特点, d 因此极大地促进了自抗扰控制理论的深入发展及在 式中:Pm为电磁功率;Tm、T,和T分别为电机的永 工程中的推广与应用61。 磁、磁阻和齿槽转矩。 以定子12槽、转子10极的三相FSPM电机作 FSPM电机的机械运动方程可以表示为 为本文的研究对象,定子绕组采用集中式分布,其 d +TL+B,wr (3) 转子结构和开关磁阻电机相似。本文在掌握了其工 de 作原理的基础上,建立了FSPM电机的稳态和动态 0,= (4) 仿真模型,并尝试将LADRC引入到电机的调速系 式中:ω,为电机机械角速度;T,为负载转矩;J为系 统中,数值仿真结果表明本文所提出的LADRC控 统的转动惯量;B,为系统的摩擦系数。 制方案能够有效地提高系统的鲁棒性和抗干扰能力。 FSPM电机的反电动势和电流均为正弦波波 形,因此其在转子旋转坐标系下(d-q轴)的模型和 1 数学模型 正弦波永磁同步电机类似。忽略铁芯饱和,经过Pak 三相12/10极FSPM电机的结构剖面如图1所 变换后的FSPM模型为 示,定子部分由U型磁芯顺次组装而成,每两个磁芯 0 0 d 。 0 dr (5 之间嵌人一块永磁体,转子上无绕组和永磁体。将12 10 0 R帅 0 个电枢线圈共分为3组,每4个串联成一相电枢绕组。 3Pm=3 (6) 永磁体 T=i8-,.+-)+Ta 定子 式中:、g、i、ig、4,分别为定子电压和定子磁 链在直轴和交轴上的分量;ω,为电角速度,w。=P,ω, P为转子极数。 永磁磁链从定子abc坐标系变换到转子d-q坐 标系后,仅仅只在d轴绕组中匝链一个恒定的永磁 磁链,FSPM的直轴永磁磁链山m和交轴永磁磁链 绕组 转子 中mg满足以下关系式: 图1FSPM电机结构图 少md=m 中mg=0 (7) Fig.1 Sectional view of FSPM motor 当转子齿与同一相线圈下分别属于两个U型 2基于LADRC的FSPM矢量控制 单元的定子齿对齐时,FSPM电机的电枢绕组里匝 链的永磁磁链的极性会发生变化,通过FSPM电机 2.1矢量控制 定转子齿之间这种独特的设计,来产生感应电势, 近年来矢量控制已在无刷交流调速系统中得到 可以实现磁通之间的切换。 了较为广泛的应用。对调速系统而言,其运行区域 假设FSPM电机的三相绕组结构与参数相同, 般可分为恒转矩区和恒功率区,其中恒转矩区是中。文献[11]提出了一种基于电压空间矢量的脉宽 调制技术 (SVPWM) 的控制策略,其目的在于使电 机获得幅值恒定的圆形磁场,提高了系统的精确 度,因此在交流电机的调速系统中得到了较为广泛 的应用。文献[12]提出了一种带积分条件的自整定 模糊 PI 控制方法,该方法对电机非线性电磁方面的 特性具有良好的适应能力。 自抗扰控制 (ADRC) 是韩京清教授创立的一 种不依赖于被控过程模型的原创性控制思想和方 法 [13] ,其核心是将系统的外部扰动以及内部未建模 动态结合在一起作为“总扰动”,通过扩张状态观测 器 (ESO) 对系统各个状态和总扰动进行在线估计, 并及时地将总扰动补偿到反馈控制中。高志强等学 者提出了线性自抗扰控制 (LADRC)[14] ,将 ADRC 的主要环节进行了线性化处理,使得获得的 LADRC 具有结构简单、易于性能分析和参数整定等特点[15] , 因此极大地促进了自抗扰控制理论的深入发展及在 工程中的推广与应用[16-19]。 以定子 12 槽、转子 10 极的三相 FSPM 电机作 为本文的研究对象,定子绕组采用集中式分布,其 转子结构和开关磁阻电机相似。本文在掌握了其工 作原理的基础上,建立了 FSPM 电机的稳态和动态 仿真模型,并尝试将 LADRC 引入到电机的调速系 统中,数值仿真结果表明本文所提出的 LADRC 控 制方案能够有效地提高系统的鲁棒性和抗干扰能力。 1 数学模型 三相 12/10 极 FSPM 电机的结构剖面如图 1 所 示,定子部分由 U 型磁芯顺次组装而成,每两个磁芯 之间嵌入一块永磁体,转子上无绕组和永磁体。将 12 个电枢线圈共分为 3 组,每 4 个串联成一相电枢绕组。 ၼ Ⅴⷭѿ 䒘ၼ 㐁㏰ A2 C1 B1 A1 C4 B4 A4 C3 B3 A3 C2 B2 图 1 FSPM 电机结构图 Fig. 1 Sectional view of FSPM motor 当转子齿与同一相线圈下分别属于两个 U 型 单元的定子齿对齐时,FSPM 电机的电枢绕组里匝 链的永磁磁链的极性会发生变化,通过 FSPM 电机 定转子齿之间这种独特的设计,来产生感应电势, 可以实现磁通之间的切换。 假设 FSPM 电机的三相绕组结构与参数相同, 忽略铁芯损耗,由此可得其在定子坐标系下的电压 方程: ua ub uc = Rph ia ib ic +L1 d dt ia ib ic + d dt ψa ψb ψc + ema emb emc (1) Rph L1 = L0 − M0 式中:ua、ub、uc 为三相电压;ia、ib、ic 为三相电流; 为绕组电阻; ,其中 L0、M0 分别为自 感和互感的基波分量;ψa、ψb、ψc 为三相绕组匝链的 总磁链;ema、emb、emc 为三相反电动势。 在电机运行过程中,如果转矩脉动过大则会对 电机的正常运行产生负面影响。由于 FSPM 电机自 身的永磁气隙磁密度比较高,该电机的齿槽转矩要 比传统的转子永磁型电机在数值上大得多。因此考 虑齿槽转矩影响后的瞬时电磁转矩为 Tem = Pem ωr = Tpm +Tr +Tcog (2) 式中: Pem为电磁功率; Tpm、Tr和 Tcog分别为电机的永 磁、磁阻和齿槽转矩。 FSPM 电机的机械运动方程可以表示为 Tem = J dωr dt +TL + Bvωr (3) ωr = dθr dt (4) ωr TL J Bv 式中: 为电机机械角速度; 为负载转矩; 为系 统的转动惯量; 为系统的摩擦系数。 FSPM 电机的反电动势和电流均为正弦波波 形,因此其在转子旋转坐标系下 (d-q 轴) 的模型和 正弦波永磁同步电机类似。忽略铁芯饱和,经过 Park 变换后的 FSPM 模型为 ud uq u0 = d dt ψd ψq ψ0 + Rph 0 0 0 Rph 0 0 0 Rph id iq i0 + −ωeψq ωeψd 0 (5) Tem = 3 2 Pem ωr = 3 2 Pr [ ψmiq + ( Ld − Lq ) idiq ] +Tcog (6) ωe ωe = Prωr Pr 式中:ud、uq、id、iq、ψd、ψq 分别为定子电压和定子磁 链在直轴和交轴上的分量; 为电角速度, ; 为转子极数。 ψmd ψmq 永磁磁链从定子 abc 坐标系变换到转子 d-q 坐 标系后,仅仅只在 d 轴绕组中匝链一个恒定的永磁 磁链, FSPM 的直轴永磁磁链 和交轴永磁磁链 满足以下关系式: { ψmd = ψm ψmq = 0 (7) 2 基于 LADRC 的 FSPM 矢量控制 2.1 矢量控制 近年来矢量控制已在无刷交流调速系统中得到 了较为广泛的应用。对调速系统而言,其运行区域 一般可分为恒转矩区和恒功率区,其中恒转矩区是 ·340· 智 能 系 统 学 报 第 13 卷