正在加载图片...
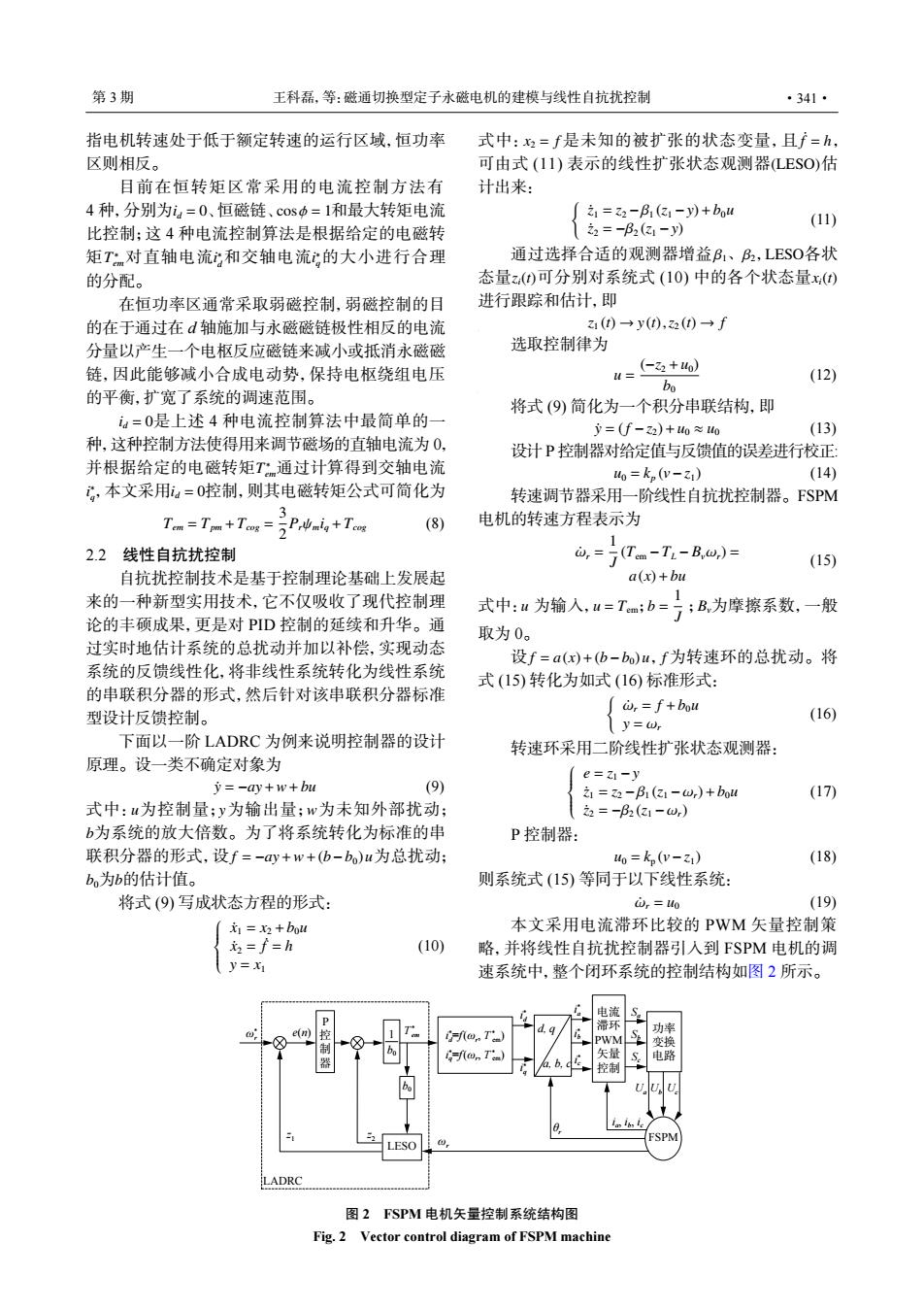
第3期 王科磊,等:磁通切换型定子永磁电机的建模与线性自抗扰控制 ·341· 指电机转速处于低于额定转速的运行区域,恒功率 式中:x?=f是未知的被扩张的状态变量,且f=h, 区则相反。 可由式(11)表示的线性扩张状态观测器LESO)估 目前在恒转矩区常采用的电流控制方法有 计出来: 4种,分别为i=0、恒磁链、cos中=1和最大转矩电流 ∫=z2-B1(3-y)+bou (11) 比控制;这4种电流控制算法是根据给定的电磁转 2=-B2(31-y) 矩T对直轴电流和交轴电流,的大小进行合理 通过选择合适的观测器增益B1、B,LESO各状 的分配。 态量()可分别对系统式(10)中的各个状态量x() 在恒功率区通常采取弱磁控制,弱磁控制的目 进行跟踪和估计,即 的在于通过在d轴施加与永磁磁链极性相反的电流 21()→y(),2(0→f 分量以产生一个电枢反应磁链来减小或抵消永磁磁 选取控制律为 链,因此能够减小合成电动势,保持电枢绕组电压 (-z2+0) l= (12) bo 的平衡,扩宽了系统的调速范围。 将式(9)简化为一个积分串联结构,即 ia=0是上述4种电流控制算法中最简单的一 y=(f-z2)+lo≈lo (13) 种,这种控制方法使得用来调节磁场的直轴电流为0, 设计P控制器对给定值与反馈值的误差进行校正: 并根据给定的电磁转矩T:通过计算得到交轴电流 =k2(w-z1) (14) ,本文采用=0控制,则其电磁转矩公式可简化为 转速调节器采用一阶线性自抗扰控制器。FSPM 3 Tom=Tm+Tog=Pwaig+Tome (8) 电机的转速方程表示为 1 2.2线性自抗扰控制 0,=jTm-TL-B4,)= (15) 自抗扰控制技术是基于控制理论基础上发展起 a(x)+bu 来的一种新型实用技术,它不仅吸收了现代控制理 1 式中:u为输入,u=Tem;b= B为摩擦系数,一般 论的丰硕成果,更是对PID控制的延续和升华。通 取为0。 过实时地估计系统的总扰动并加以补偿,实现动态 设f=a(x)+(b-bo),f为转速环的总扰动。将 系统的反馈线性化,将非线性系统转化为线性系统 式(15)转化为如式(16)标准形式: 的串联积分器的形式,然后针对该串联积分器标准 ù,=f+bow 型设计反馈控制。 (16) y=wr 下面以一阶LADRC为例来说明控制器的设计 转速环采用二阶线性扩张状态观测器: 原理。设一类不确定对象为 e=zI-y y=-ay+w+bu (9) 21=z2-B1(z1-w,)+bou (17) 式中:u为控制量;y为输出量;w为未知外部扰动: 2=-B2(21-wr) b为系统的放大倍数。为了将系统转化为标准的串 P控制器: 联积分器的形式,设f=-ay+w+(b-bo)u为总扰动: 0=k,(v-z1) (18) b为b的估计值。 则系统式(15)等同于以下线性系统: 将式(9)写成状态方程的形式: ù,=lo (19) =x2+bou 本文采用电流滞环比较的PWM矢量控制策 =f=h 10) 略,并将线性自抗扰控制器引入到FSPM电机的调 y=x 速系统中,整个闭环系统的控制结构如图2所示。 环 e(n @.T) f@T) 电路 器 LESO LADRC 图2FSPM电机矢量控制系统结构图 Fig.2 Vector control diagram of FSPM machine指电机转速处于低于额定转速的运行区域,恒功率 区则相反。 id = 0 cosϕ = 1 T ∗ em i ∗ d i ∗ q 目前在恒转矩区常采用的电流控制方法有 4 种,分别为 、恒磁链、 和最大转矩电流 比控制;这 4 种电流控制算法是根据给定的电磁转 矩 对直轴电流 和交轴电流 的大小进行合理 的分配。 在恒功率区通常采取弱磁控制,弱磁控制的目 的在于通过在 d 轴施加与永磁磁链极性相反的电流 分量以产生一个电枢反应磁链来减小或抵消永磁磁 链,因此能够减小合成电动势,保持电枢绕组电压 的平衡,扩宽了系统的调速范围。 id = 0 T ∗ em i ∗ q id = 0 是上述 4 种电流控制算法中最简单的一 种,这种控制方法使得用来调节磁场的直轴电流为 0, 并根据给定的电磁转矩 通过计算得到交轴电流 ,本文采用 控制,则其电磁转矩公式可简化为 Tem = Tpm +Tcog = 3 2 Prψmiq +Tcog (8) 2.2 线性自抗扰控制 自抗扰控制技术是基于控制理论基础上发展起 来的一种新型实用技术,它不仅吸收了现代控制理 论的丰硕成果,更是对 PID 控制的延续和升华。通 过实时地估计系统的总扰动并加以补偿,实现动态 系统的反馈线性化,将非线性系统转化为线性系统 的串联积分器的形式,然后针对该串联积分器标准 型设计反馈控制。 下面以一阶 LADRC 为例来说明控制器的设计 原理。设一类不确定对象为 y˙ = −ay+w+bu (9) u y w b f = −ay+w+(b−b0)u b0 b 式中: 为控制量; 为输出量; 为未知外部扰动; 为系统的放大倍数。为了将系统转化为标准的串 联积分器的形式,设 为总扰动; 为 的估计值。 将式 (9) 写成状态方程的形式: x˙1 = x2 +b0u x˙2 = ˙f = h y = x1 (10) x2 = f ˙f = h (LESO) 式中: 是未知的被扩张的状态变量,且 , 可由式 (11) 表示的线性扩张状态观测器 估 计出来: { z˙1 = z2 −β1 (z1 −y)+b0u z˙2 = −β2 (z1 −y) (11) β1、β2 LESO zi(t) xi(t) 通过选择合适的观测器增益 , 各状 态量 可分别对系统式 (10) 中的各个状态量 进行跟踪和估计,即 z1 (t) → y (t),z2 (t) → f 选取控制律为 u = (−z2 +u0) b0 (12) 将式 (9) 简化为一个积分串联结构,即 y˙ = (f −z2)+u0 ≈ u0 (13) 设计 P 控制器对给定值与反馈值的误差进行校正: u0 = kp (v−z1) (14) 转速调节器采用一阶线性自抗扰控制器。FSPM 电机的转速方程表示为 ω˙ r = 1 J (Tem −TL − Bvωr) = a(x)+bu (15) u u = Tem b = 1 J 式中: 为输入, ; ; Bv为摩擦系数,一般 取为 0。 设 f = a(x)+(b−b0)u, f 为转速环的总扰动。将 式 (15) 转化为如式 (16) 标准形式: { ω˙ r = f +b0u y = ωr (16) 转速环采用二阶线性扩张状态观测器: e = z1 −y z˙1 = z2 −β1 (z1 −ωr)+b0u z˙2 = −β2 (z1 −ωr) (17) P 控制器: u0 = kp (v−z1) (18) 则系统式 (15) 等同于以下线性系统: ω˙ r = u0 (19) 本文采用电流滞环比较的 PWM 矢量控制策 略,并将线性自抗扰控制器引入到 FSPM 电机的调 速系统中,整个闭环系统的控制结构如图 2 所示。 ω* r e(n) P 控 制 器 1 b0 b0 T * em z2 z1 LESO LADRC ωr i * d=f(ωr , T * em) i * q=f(ωr , T * em) i * d i * a i * b i * c i * q d, q a, b, c 电流 滞环 PWM 矢量 控制 Sa Sb Sc 功率 变换 电路 Ua Ub Uc FSPM ia , ib , i c θr 图 2 FSPM 电机矢量控制系统结构图 Fig. 2 Vector control diagram of FSPM machine 第 3 期 王科磊,等:磁通切换型定子永磁电机的建模与线性自抗扰控制 ·341·