正在加载图片...
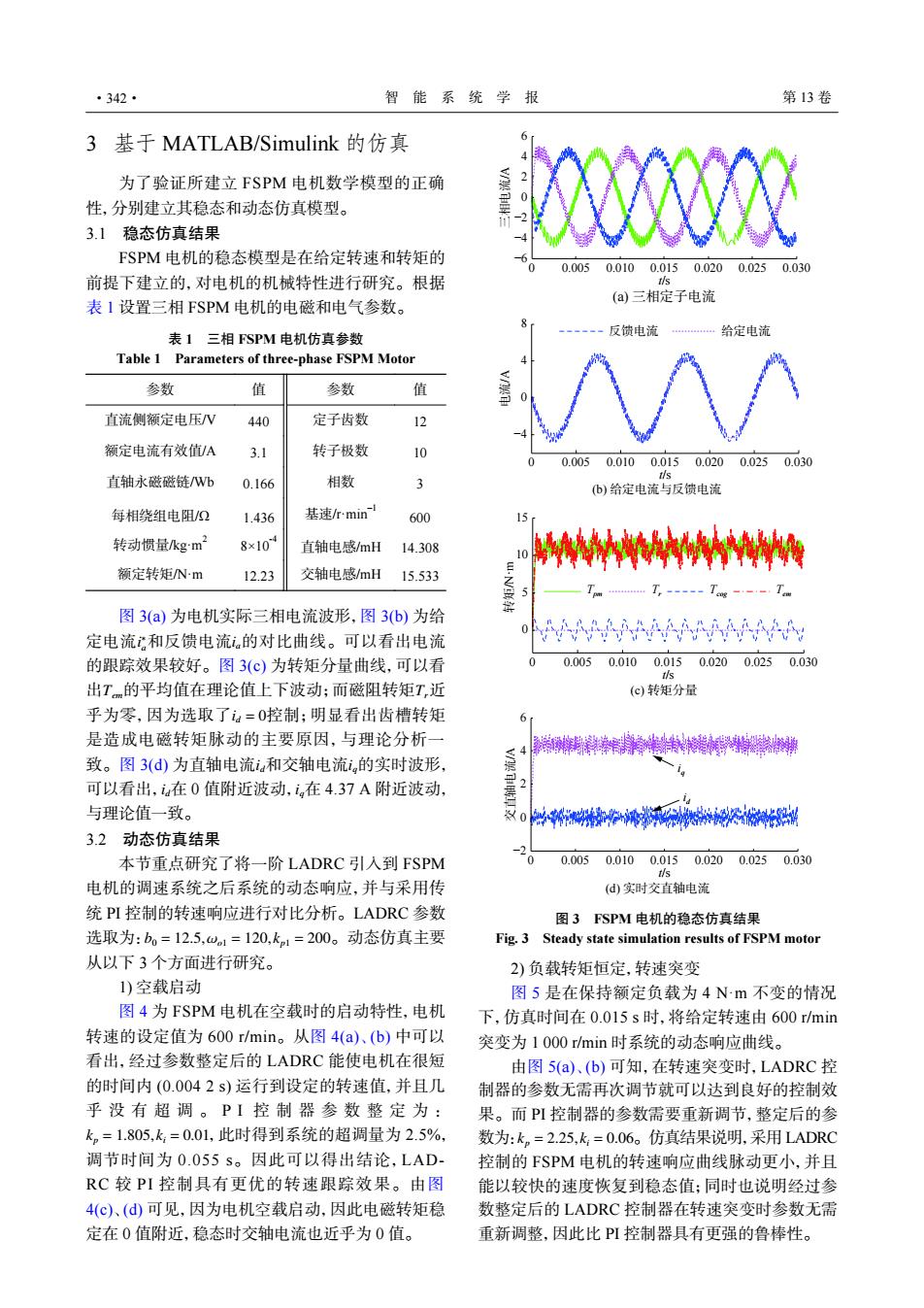
·342· 智能系统学报 第13卷 3基于MATLAB/Simulink的仿真 为了验证所建立FSPM电机数学模型的正确 2 性,分别建立其稳态和动态仿真模型。 3.1稳态仿真结果 FSPM电机的稳态模型是在给定转速和转矩的 0.0050.0100.0150.0200.0250.030 前提下建立的,对电机的机械特性进行研究。根据 s 表1设置三相FSPM电机的电磁和电气参数。 (a)三相定子电流 表1三相FSPM电机仿真参数 反馈电流 给定电流 Table 1 Parameters of three-phase FSPM Motor 参数 值 参数 值 直流侧额定电压V 440 定子齿数 额定电流有效值/A 3.1 转子极数 9 0.0050.0100.0150.0200.0250.030 只 直轴永磁磁链/Wb 0.166 相数 3 (b)给定电流与反馈电流 每相绕组电阻/Q 1.436 基速rmin 600 5 转动惯量/kgm2 8×104 直轴电感/mH 14.308 林换 额定转矩N·m 12.23 交轴电感/mH 15.533 5 Toog--To 图3(a)为电机实际三相电流波形,图3(b)为给 定电流:和反馈电流的对比曲线。可以看出电流 A八y4Ay 的跟踪效果较好。图3(©)为转矩分量曲线,可以看 0.0050.0100.0150.0200.0250.030 出Tm的平均值在理论值上下波动;而磁阻转矩T,近 (c)转矩分量 乎为零,因为选取了i=0控制;明显看出齿槽转矩 是造成电磁转矩脉动的主要原因,与理论分析一 致。图3(d)为直轴电流i和交轴电流i,的实时波形, 可以看出,在0值附近波动,在4.37A附近波动, 与理论值一致。 3.2动态仿真结果 本节重点研究了将一阶LADRC引入到FSPM 0.0050.010 0.0150.0200.0250.030 1/s 电机的调速系统之后系统的动态响应,并与采用传 (d)实时交直轴电流 统PI控制的转速响应进行对比分析。LADRC参数 图3FSPM电机的稳态仿真结果 选取为:b=12.5,w1=120,kp1=200。动态仿真主要 Fig.3 Steady state simulation results of FSPM motor 从以下3个方面进行研究。 2)负载转矩恒定,转速突变 1)空载启动 图5是在保持额定负载为4Nm不变的情况 图4为FSPM电机在空载时的启动特性,电机 下,仿真时间在0.015s时,将给定转速由600rmin 转速的设定值为600r/min。从图4(a)、(b)中可以 突变为1000 r/min时系统的动态响应曲线。 看出,经过参数整定后的LADRC能使电机在很短 由图5(a)、(b)可知,在转速突变时,LADRC控 的时间内(0.0042s)运行到设定的转速值,并且几 制器的参数无需再次调节就可以达到良好的控制效 乎没有超调。PI控制器参数整定为: 果。而PI控制器的参数需要重新调节,整定后的参 k,=1.805,k=0.01,此时得到系统的超调量为2.5%, 数为:k。=2.25,k=0.06。仿真结果说明,采用LADRC 调节时间为0.055s。因此可以得出结论,LAD- 控制的FSPM电机的转速响应曲线脉动更小,并且 RC较PI控制具有更优的转速跟踪效果。由图 能以较快的速度恢复到稳态值;同时也说明经过参 4(c)、()可见,因为电机空载启动,因此电磁转矩稳 数整定后的LADRC控制器在转速突变时参数无需 定在0值附近,稳态时交轴电流也近乎为0值。 重新调整,因此比PI控制器具有更强的鲁棒性。3 基于 MATLAB/Simulink 的仿真 为了验证所建立 FSPM 电机数学模型的正确 性,分别建立其稳态和动态仿真模型。 3.1 稳态仿真结果 FSPM 电机的稳态模型是在给定转速和转矩的 前提下建立的,对电机的机械特性进行研究。根据 表 1 设置三相 FSPM 电机的电磁和电气参数。 表 1 三相 FSPM 电机仿真参数 Table 1 Parameters of three-phase FSPM Motor 参数 值 参数 值 直流侧额定电压/V 440 定子齿数 12 额定电流有效值/A 3.1 转子极数 10 直轴永磁磁链/Wb 0.166 相数 3 每相绕组电阻/Ω 1.436 基速/r·min–1 600 转动惯量/kg·m2 8×10-4 直轴电感/mH 14.308 额定转矩/N·m 12.23 交轴电感/mH 15.533 i ∗ a ia Tem Tr id = 0 id iq id iq 图 3(a) 为电机实际三相电流波形,图 3(b) 为给 定电流 和反馈电流 的对比曲线。可以看出电流 的跟踪效果较好。图 3(c) 为转矩分量曲线,可以看 出 的平均值在理论值上下波动;而磁阻转矩 近 乎为零,因为选取了 控制;明显看出齿槽转矩 是造成电磁转矩脉动的主要原因,与理论分析一 致。图 3(d) 为直轴电流 和交轴电流 的实时波形, 可以看出, 在 0 值附近波动, 在 4.37 A 附近波动, 与理论值一致。 3.2 动态仿真结果 b0 = 12.5,ωo1 = 120, kp1 = 200 本节重点研究了将一阶 LADRC 引入到 FSPM 电机的调速系统之后系统的动态响应,并与采用传 统 PI 控制的转速响应进行对比分析。LADRC 参数 选取为: 。动态仿真主要 从以下 3 个方面进行研究。 1) 空载启动 kp = 1.805, ki = 0.01 图 4 为 FSPM 电机在空载时的启动特性,电机 转速的设定值为 600 r/min。从图 4(a)、(b) 中可以 看出,经过参数整定后的 LADRC 能使电机在很短 的时间内 (0.004 2 s) 运行到设定的转速值,并且几 乎没有超调。 P I 控制器参数整定为: ,此时得到系统的超调量为 2.5%, 调节时间为 0.055 s。因此可以得出结论,LADRC 较 PI 控制具有更优的转速跟踪效果。由图 4(c)、(d) 可见,因为电机空载启动,因此电磁转矩稳 定在 0 值附近,稳态时交轴电流也近乎为 0 值。 0 0.005 0.010 0.015 0.020 0.025 0.030 −6 −4 −2 0 2 4 6 三相电流/A t/s (a) 三相定子电流 0 0.005 0.010 0.015 0.020 0.025 0.030 −4 0 4 电流/A 反馈电流 给定电流 (b) 给定电流与反馈电流 8 t/s 0 0.005 0.010 0.015 0.020 0.025 0.030 0 5 10 15 Tpm Tr Tcog Tem 转矩/N·m t/s (c) 转矩分量 0 0.005 0.010 0.015 0.020 0.025 0.030 −2 0 2 4 6 交直轴电流/A iq id t/s (d) 实时交直轴电流 图 3 FSPM 电机的稳态仿真结果 Fig. 3 Steady state simulation results of FSPM motor 2) 负载转矩恒定,转速突变 图 5 是在保持额定负载为 4 N·m 不变的情况 下,仿真时间在 0.015 s 时,将给定转速由 600 r/min 突变为 1 000 r/min 时系统的动态响应曲线。 kp = 2.25, ki = 0.06 由图 5(a)、(b) 可知,在转速突变时,LADRC 控 制器的参数无需再次调节就可以达到良好的控制效 果。而 PI 控制器的参数需要重新调节,整定后的参 数为: 。仿真结果说明,采用 LADRC 控制的 FSPM 电机的转速响应曲线脉动更小,并且 能以较快的速度恢复到稳态值;同时也说明经过参 数整定后的 LADRC 控制器在转速突变时参数无需 重新调整,因此比 PI 控制器具有更强的鲁棒性。 ·342· 智 能 系 统 学 报 第 13 卷