正在加载图片...
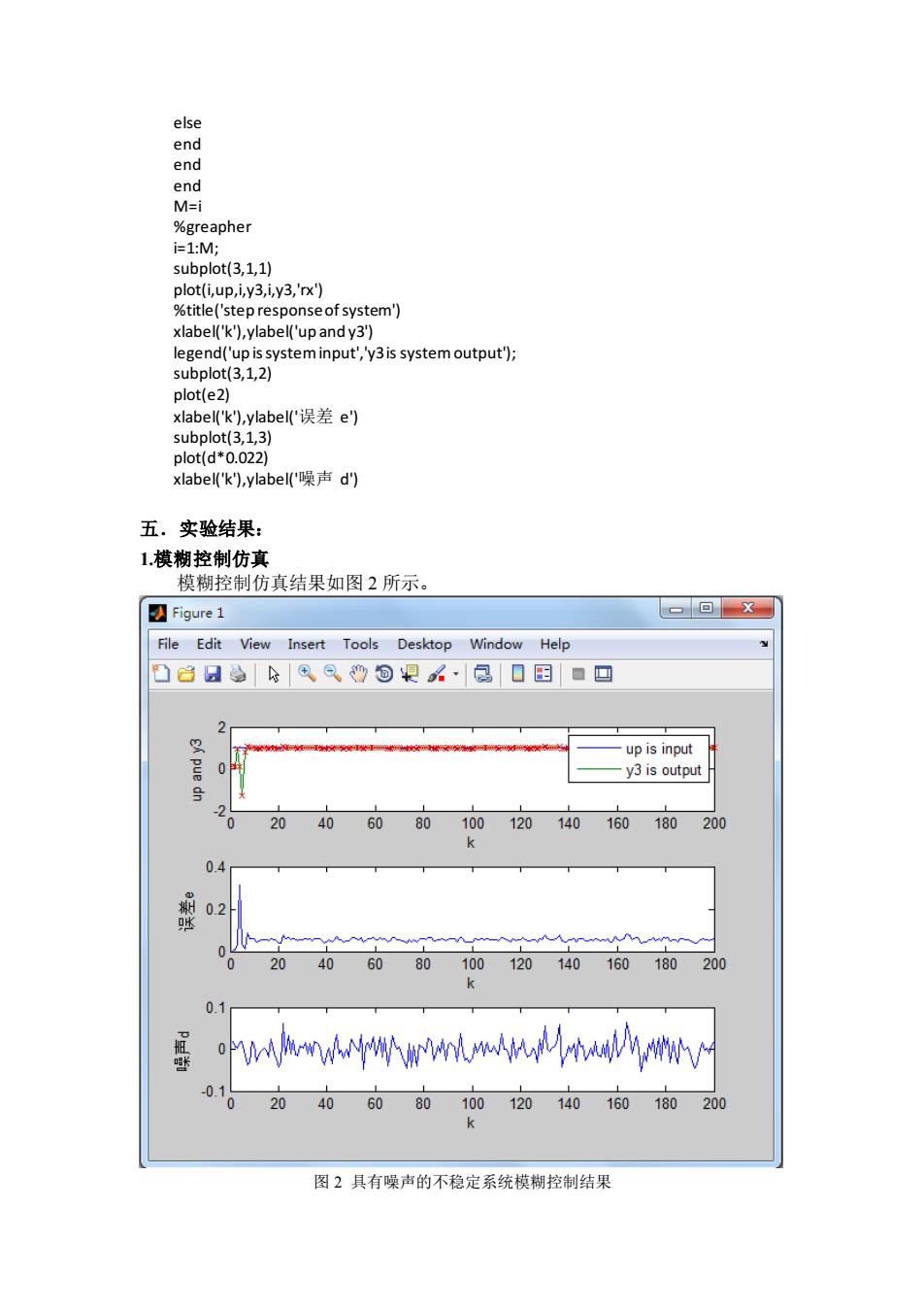
else end end end M=i %greapher i=1:M; subplot(3,1,1) plot(i,up,i,y3,i,y3,'rx") %title('step response of system') xlabel('k'),ylabel('up and y3) legend('up is system input','y3 is system output'); subplot(3,1,2) plot(e2) xlabel(('k),ylabel('误差e') subplot(3,1,3) plot(d*0.022) xlabel('k',ylabel('噪声d') 五。实验结果: 1模糊控制仿真 模糊控制仿真结果如图2所示。 ☑Figure1 -▣X File Edit View Insert Tools Desktop Window Help 台日始6®⑨9早公,同日国口回 2 up is input y3 is output 号 20406080100120140160 180200 0.4 02 账 20406080100120140160180200 0.1 ythw nh 0. 0 20406080100120140160180200 图2具有噪声的不稳定系统模糊控制结果else end end end M=i %greapher i=1:M; subplot(3,1,1) plot(i,up,i,y3,i,y3,'rx') %title('step response of system') xlabel('k'),ylabel('up and y3') legend('up is system input','y3 is system output'); subplot(3,1,2) plot(e2) xlabel('k'),ylabel('误差 e') subplot(3,1,3) plot(d*0.022) xlabel('k'),ylabel('噪声 d') 五.实验结果: 1.模糊控制仿真 模糊控制仿真结果如图 2 所示。 图 2 具有噪声的不稳定系统模糊控制结果