正在加载图片...
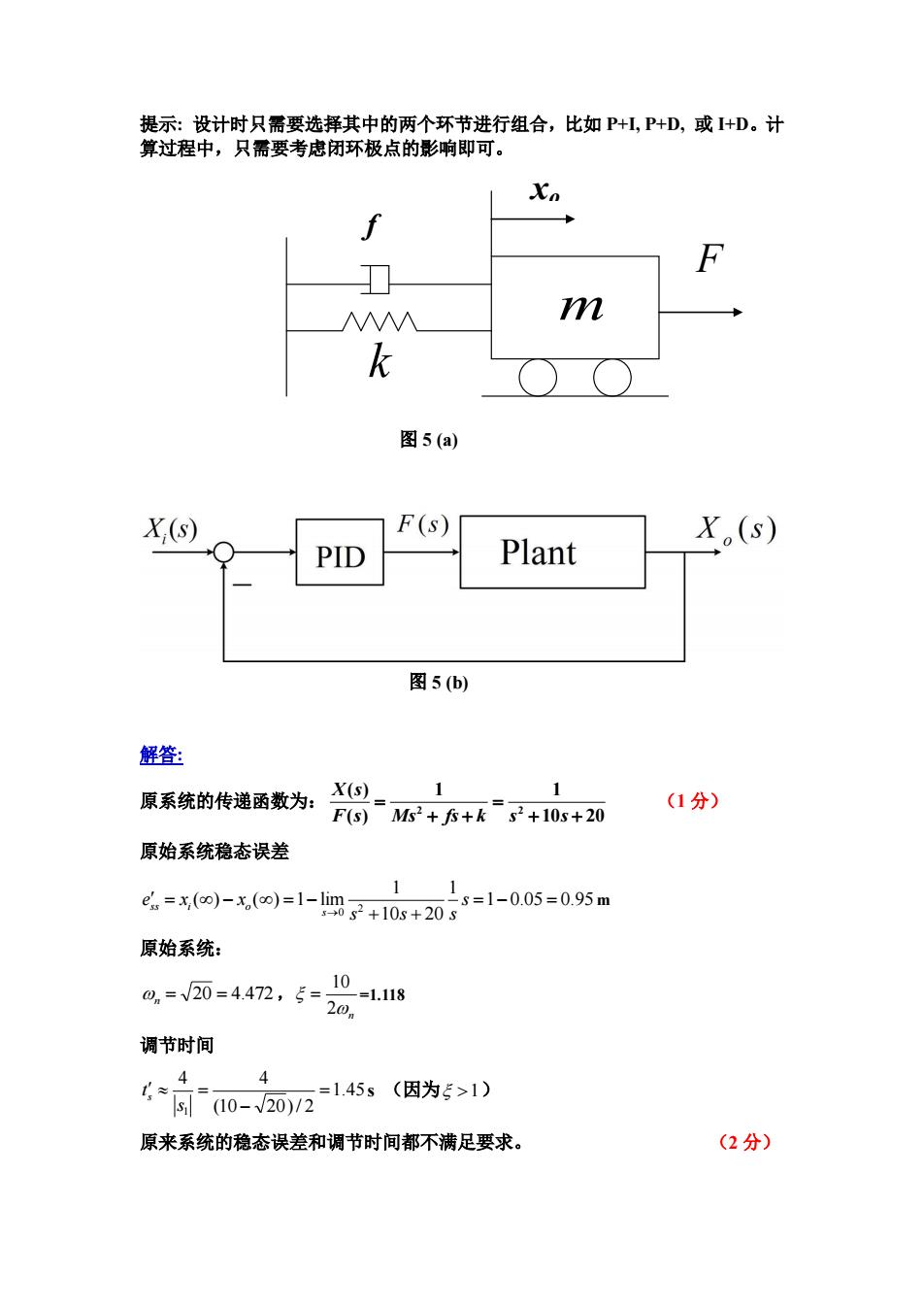
提示:设计时只需要选择其中的两个环节进行组合,比如P+L,P+D,或I+D。计 算过程中,只需要考虑闭环极点的影响即可。 M m k 图5(a) X(s) F(s) X (s) PID Plant 图5(b) 解答: 原系统的传递函数为: X=1 1 Fs)MS2+F+ks2+105+20 (1分) 原始系统稳态误差 11 e.=x(o)-x(o)=1-lm0g2+10s+20 s=1-0.05=0.95m 原始系统: 0,=20=4.472,5=2 10 -=1.118 调节时间 4 4 t≈ (10-20)/2 =1.45s(因为5>1) 原来系统的稳态误差和调节时间都不满足要求。 (2分)提示: 设计时只需要选择其中的两个环节进行组合,比如 P+I, P+D, 或 I+D。计 算过程中,只需要考虑闭环极点的影响即可。 图 5 (a) 图 5 (b) 解答: 原系统的传递函数为: 2 2 ( ) 1 1 ( ) 10 20 X s F s Ms fs k s s (1 分) 原始系统稳态误差 1 0.05 0.95 1 10 20 1 ( ) ( ) 1 lim 2 0 s s s s e x x s ss i o m 原始系统: n 20 4.472 , n 2 10 =1.118 调节时间 1.45 (10 20)/ 2 4 4 1 s t s s (因为 1 ) 原来系统的稳态误差和调节时间都不满足要求。 (2 分) F f k m xo