正在加载图片...
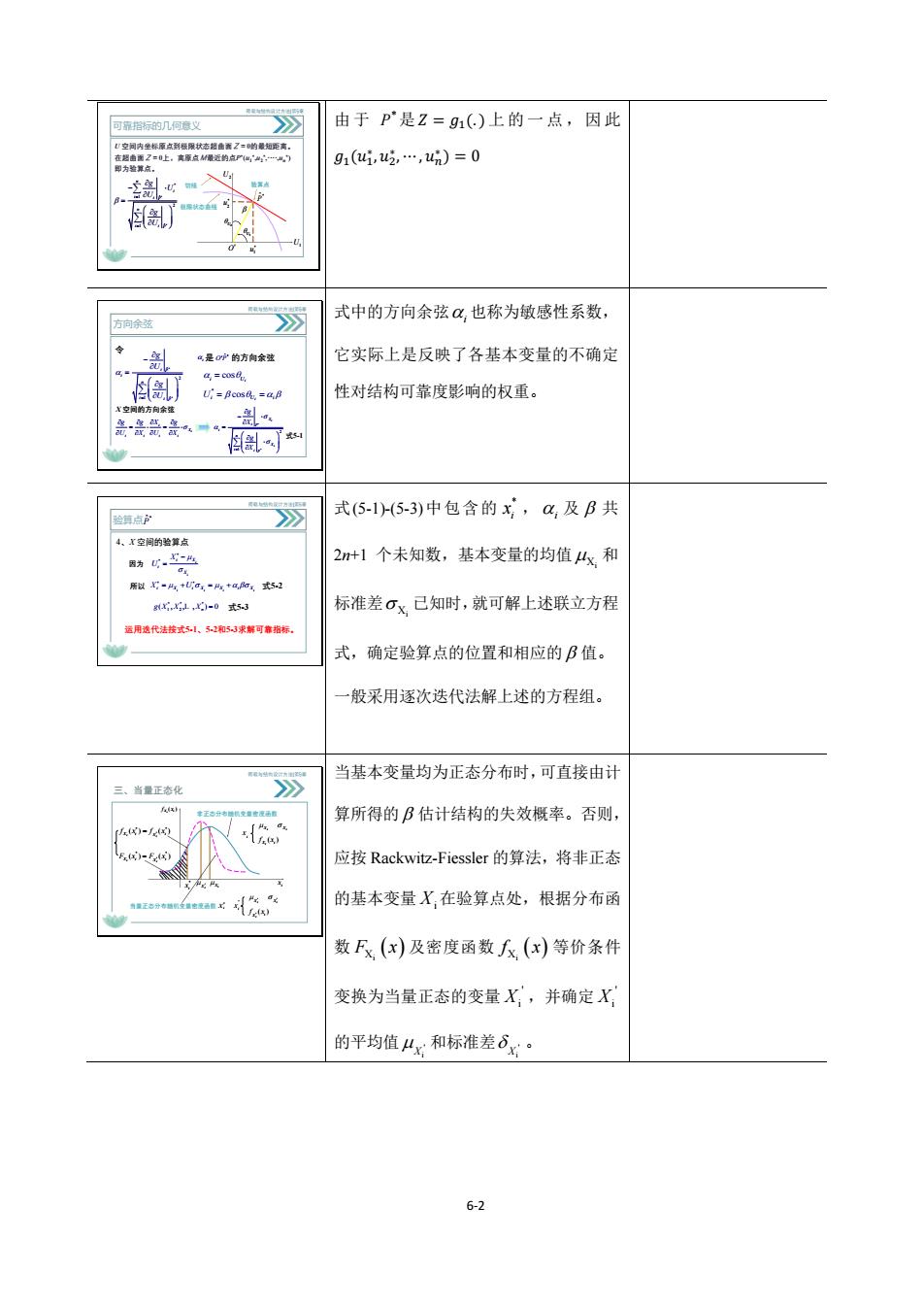
由于P是Z=91()上的一点,因此 g1(ui,u2,…,u%)=0 式中的方向余弦α,也称为敏感性系数, 气是O少的方肉余室 它实际上是反映了各基本变量的不确定 性对结构可靠度影响的权重。 式(6-15-3)中包含的x,a,及B共 2+1个未知数,基本变量的均值以,和 标准差0x己知时,就可解上述联立方程 式,确定验算点的位置和相应的B值。 般采用逐次迭代法解上述的方程组, 当基本变量均为正态分布时,可直接由计 三、当量正态化 》 算所得的B估计结构的失效概率。否则, - 应按Rackwitz-Fiessler的算法,将非正态 的基本变量X在验算点处,根据分布函 数Fx(x)及密度函数人(x)等价条件 变换为当量正态的变量X,并确定X 的平均值4x和标准差6。 62 6-2 荷载与结构设计方法|第5章 可靠指标的几何意义 U 空间内坐标原点到极限状态超曲面Z=0的最短距离。 在超曲面Z=0上,离原点M最近的点P* (u1 * ,u2 * ,····,un * ) 即为验算点。 * * * 1 ˆ 2 1 ˆ n i i i P n i i P g U U g U = = − = * 1 u * 2 u U1 U2 切线 验算点 极限状态曲线 U1 U2 * P ˆ O 由 于 P * 是 𝑍 = 𝑔1(. ) 上 的 一 点 , 因 此 𝑔1(𝑢1 ∗ , 𝑢2 ∗ , ⋯ , 𝑢𝑛 ∗ ) = 0 荷载与结构设计方法|第5章 方向余弦 i 令 * * ˆ 2 1 ˆ i P i n i i P g U g U = − = 是 OP ˆ * 的方向余弦 cos i i U = * cos i Ui U i = = i i X i i i i g g g X U X U X = = * * 2 1 i i X i P i n X i i P g X g X = − = X 空间的方向余弦 式5-1 式中的方向余弦 i 也称为敏感性系数, 它实际上是反映了各基本变量的不确定 性对结构可靠度影响的权重。 荷载与结构设计方法|第5章 验算点 * P ˆ 因为 * * i i i X i X X U − = * * i i i i X U i X i X X i X = + = + * * * 1 2 ( , , , ) 0 n g X X X L = 4、X 空间的验算点 所以 运用迭代法按式5-1、5-2和5-3求解可靠指标。 式5-2 式5-3 式(5-1)-(5-3)中包含的 * i x , i 及 共 2n+1 个未知数,基本变量的均值 Xi 和 标准差 Xi 已知时,就可解上述联立方程 式,确定验算点的位置和相应的 值。 一般采用逐次迭代法解上述的方程组。 荷载与结构设计方法|第5章 三、当量正态化 Xi i x () X i i f x Xi ' Xi * i x ' * * ( ) ( ) i i X i i X f x f x = ' * * ( ) ( ) i i X i i X F x F x = 非正态分布随机变量密度函数 Xi Xi ( ) X i i f x i X ' 当量正态分布随机变量密度函数 Xi ' Xi ' Xi ' ( ) i X i f x ' i X 当基本变量均为正态分布时,可直接由计 算所得的 估计结构的失效概率。否则, 应按 Rackwitz-Fiessler 的算法,将非正态 的基本变量 Xi 在验算点处,根据分布函 数 ( ) Xi F x 及密度函数 ( ) Xi f x 等价条件 变换为当量正态的变量 ' Xi ,并确定 ' Xi 的平均值 ' i X 和标准差 ' i X