正在加载图片...
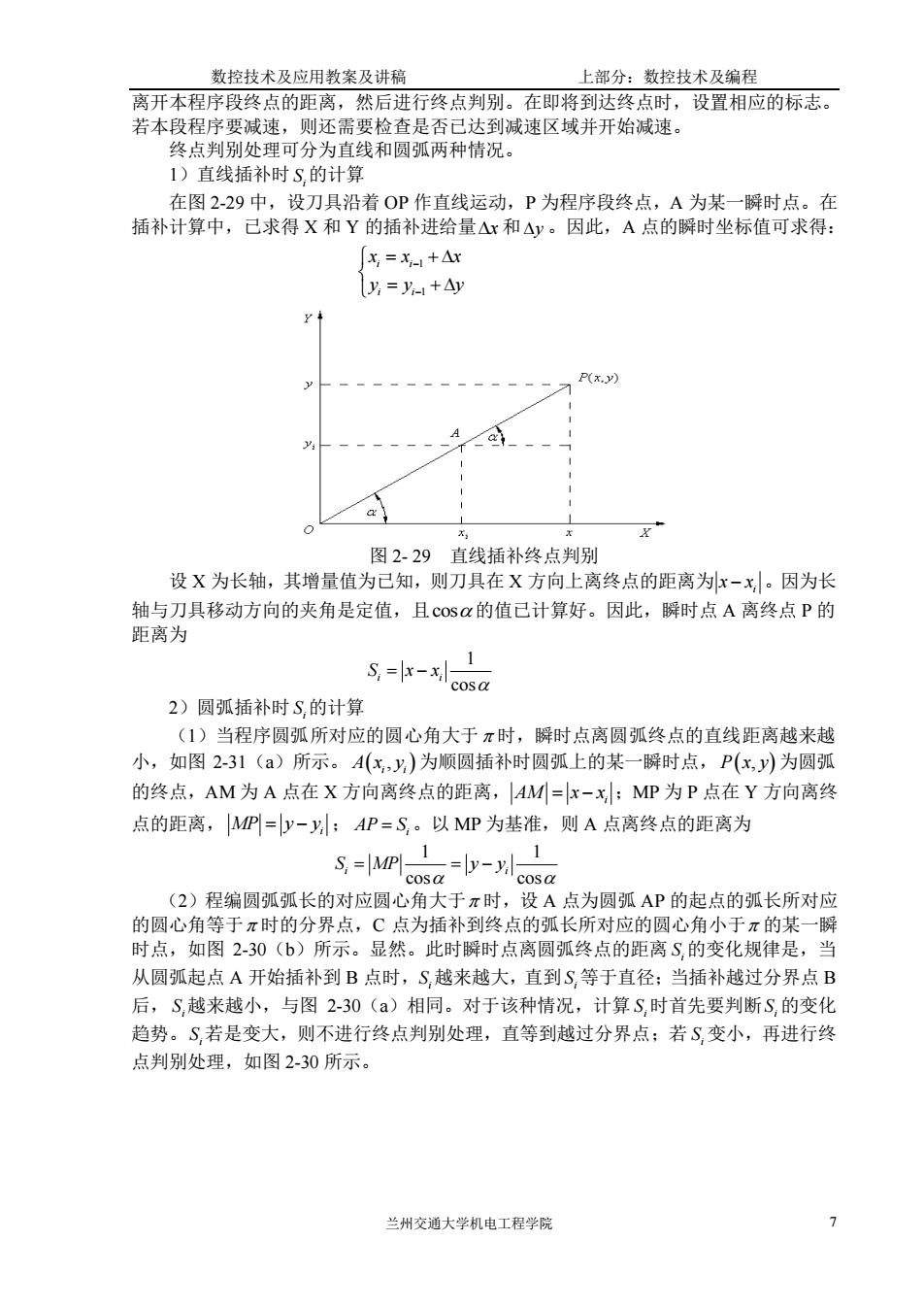
数控技术及应用教案及讲稿 上部分:数控技术及编程 离开本程序段终点的距离,然后进行终点判别。在即将到达终点时,设置相应的标志。 若本段程序要减速,则还需要检查是否己达到减速区域并开始减速。 终点判别处理可分为直线和圆弧两种情况。 1)直线插补时S的计算 在图229中,设刀具沿若OP作直线运动,P为程序段终点,A为某一瞬时点。在 插补计算中,己求得X和Y的插补进给量△x和△y。因此,A点的瞬时坐标值可求得: =x+△x y=y-+Ay P(x.y) A a】 图2.29直线插补终点判别 设X为长轴,其增量值为已知,则刀具在X方向上离终点的距离为一x。因为长 轴与刀具移动方向的夹角是定值,且cOsα的值己计算好。因此,瞬时点A离终点P的 距离为 1 2)圆弧插补时S,的计算 (1)当程序圆弧所对应的圆心角大于π时,瞬时点离圆弧终点的直线距离越来越 小,如图2-31(a)所示。A(x,y)为顺圆插补时圆弧上的某一瞬时点,P(x,y)为圆弧 的终点,AM为A点在X方向离终点的距离,AM=-x:MP为P点在Y方向离终 点的距离,MP=y-:AP=S。以MP为基准,则A点离终点的距离为 S.-MPl cosa-ly-y cosa (2)程编圆弧弧长的对应圆心角大于π时,设A点为圆弧AP的起点的弧长所对应 的圆心角等于x时的分界点,C点为插补到终点的弧长所对应的圆心角小干的装一瞬 时点,如图2-30(b)所示。显然。此时瞬时点离圆弧终点的距离S,的变化规律是,当 从圆弧起点A开始插补到B点时,S越来越大,直到S等于直径:当插补越过分界点B 后,S,越来越小,与图2-30(a)相同。对于该种情况,计算S时首先要判断S,的变化 趋势。S,若是变大,则不进行终点判别处理,直等到越过分界点:若S,变小,再进行终 点判别处理,如图2-30所示。 兰州交通大学机电工程学院数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 7 离开本程序段终点的距离,然后进行终点判别。在即将到达终点时,设置相应的标志。 若本段程序要减速,则还需要检查是否已达到减速区域并开始减速。 终点判别处理可分为直线和圆弧两种情况。 1)直线插补时 i S 的计算 在图 2-29 中,设刀具沿着 OP 作直线运动,P 为程序段终点,A 为某一瞬时点。在 插补计算中,已求得 X 和 Y 的插补进给量 x 和 y 。因此,A 点的瞬时坐标值可求得: 1 1 i i i i x x x y y y − − = + = + 图 2- 29 直线插补终点判别 设 X 为长轴,其增量值为已知,则刀具在 X 方向上离终点的距离为 i x x − 。因为长 轴与刀具移动方向的夹角是定值,且 cos 的值已计算好。因此,瞬时点 A 离终点 P 的 距离为 1 cos i i S x x = − 2)圆弧插补时 i S 的计算 (1)当程序圆弧所对应的圆心角大于 时,瞬时点离圆弧终点的直线距离越来越 小,如图 2-31(a)所示。 A x y ( i i , ) 为顺圆插补时圆弧上的某一瞬时点, P x y ( , ) 为圆弧 的终点,AM 为 A 点在 X 方向离终点的距离, AM x x = − i ;MP 为 P 点在 Y 方向离终 点的距离, MP y y = − i ; AP S = i 。以 MP 为基准,则 A 点离终点的距离为 1 1 cos cos i i S MP y y = = − (2)程编圆弧弧长的对应圆心角大于 时,设 A 点为圆弧 AP 的起点的弧长所对应 的圆心角等于 时的分界点,C 点为插补到终点的弧长所对应的圆心角小于 的某一瞬 时点,如图 2-30(b)所示。显然。此时瞬时点离圆弧终点的距离 i S 的变化规律是,当 从圆弧起点 A 开始插补到 B 点时, i S 越来越大,直到 i S 等于直径;当插补越过分界点 B 后, i S 越来越小,与图 2-30(a)相同。对于该种情况,计算 i S 时首先要判断 i S 的变化 趋势。 i S 若是变大,则不进行终点判别处理,直等到越过分界点;若 i S 变小,再进行终 点判别处理,如图 2-30 所示