正在加载图片...
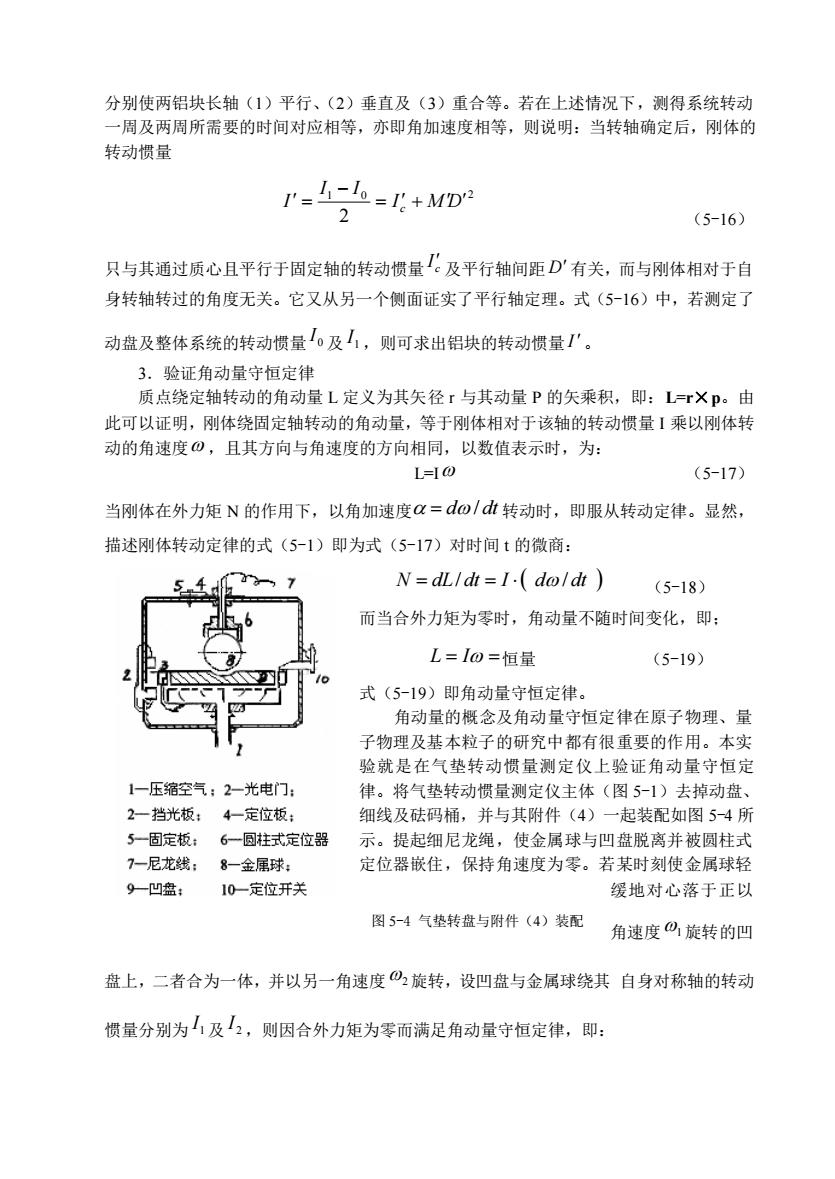
分别使两铝块长轴(1)平行、(2)垂直及(3)重合等。若在上述情况下,测得系统转动 一周及两周所需要的时间对应相等,亦即角加速度相等,则说明:当转轴确定后,刚体的 转动惯量 =h=+MD 2 (5-16) 只与其通过质心且平行于固定轴的转动惯量:及平行轴间距D'有关,而与刚体相对于自 身转轴转过的角度无关。它又从另一个侧面证实了平行轴定理。式(5-16)中,若测定了 动盘及整体系统的转动惯量'0及,则可求出铝块的转动惯量'。 3.验证角动量守恒定律 质点绕定轴转动的角动量L定义为其矢径r与其动量P的矢乘积,即:L=Xp。由 此可以证明,刚体绕固定轴转动的角动量,等于刚体相对于该轴的转动惯量Ⅰ乘以刚体转 动的角速度0,且其方向与角速度的方向相同,以数值表示时,为: L-@ (5-17) 当刚体在外力矩N的作用下,以角加速度a=dO/h转动时,即服从转动定律。显然, 描述刚体转动定律的式(5-1)即为式(5-17)对时间t的微商: N=dL/dh=I.(doldt) (5-18) 而当合外力矩为零时,角动量不随时间变化,即: L=I0=恒量 (5-19) 式(5-19)即角动量守恒定律。 角动量的概念及角动量守恒定律在原子物理、量 子物理及基本粒子的研究中都有很重要的作用。本实 验就是在气垫转动惯量测定仪上验证角动量守恒定 1一压缩空气:2-光电门: 律。将气垫转动惯量测定仪主体(图5-1)去掉动盘、 2一挡光板: 4定位板 细线及砝码桶,并与其附件(4)一起装配如图5-4所 5一固定板:6一圆柱式定位器 示。提起细尼龙绳,使金属球与凹盘脱离并被圆柱式 1一尼龙线: 8一金属球: 定位器嵌住,保持角速度为零。若某时刻使金属球轻 9一凹盘: 10一定位开关 缓地对心落于正以 图5-4气垫转盘与附件(4)装配 角速度)旋转的凹 盘上,二者合为一体,并以另一角速度2旋转,设凹盘与金属球绕其自身对称轴的转动 惯量分别为及2,则因合外力矩为零而满足角动量守恒定律,即:分别使两铝块长轴(1)平行、(2)垂直及(3)重合等。若在上述情况下,测得系统转动 一周及两周所需要的时间对应相等,亦即角加速度相等,则说明:当转轴确定后,刚体的 转动惯量 1 0 2 2 I M D I I I c = + − = (5-16) 只与其通过质心且平行于固定轴的转动惯量 c I 及平行轴间距 D 有关,而与刚体相对于自 身转轴转过的角度无关。它又从另一个侧面证实了平行轴定理。式(5-16)中,若测定了 动盘及整体系统的转动惯量 0 I 及 1 I ,则可求出铝块的转动惯量 I。 3.验证角动量守恒定律 质点绕定轴转动的角动量 L 定义为其矢径 r 与其动量 P 的矢乘积,即:L=r×p。由 此可以证明,刚体绕固定轴转动的角动量,等于刚体相对于该轴的转动惯量 I 乘以刚体转 动的角速度 ,且其方向与角速度的方向相同,以数值表示时,为: L=I (5-17) 当刚体在外力矩 N 的作用下,以角加速度 = d/ dt 转动时,即服从转动定律。显然, 描述刚体转动定律的式(5-1)即为式(5-17)对时间 t 的微商: N = dL/ dt = I ( d / dt ) (5-18) 而当合外力矩为零时,角动量不随时间变化,即; L = I = 恒量 (5-19) 式(5-19)即角动量守恒定律。 角动量的概念及角动量守恒定律在原子物理、量 子物理及基本粒子的研究中都有很重要的作用。本实 验就是在气垫转动惯量测定仪上验证角动量守恒定 律。将气垫转动惯量测定仪主体(图 5-1)去掉动盘、 细线及砝码桶,并与其附件(4)一起装配如图 5-4 所 示。提起细尼龙绳,使金属球与凹盘脱离并被圆柱式 定位器嵌住,保持角速度为零。若某时刻使金属球轻 缓地对心落于正以 角速度 1 旋转的凹 盘上,二者合为一体,并以另一角速度 2 旋转,设凹盘与金属球绕其 自身对称轴的转动 惯量分别为 1 I 及 2 I ,则因合外力矩为零而满足角动量守恒定律,即: 图 5-4 气垫转盘与附件(4)装配