正在加载图片...
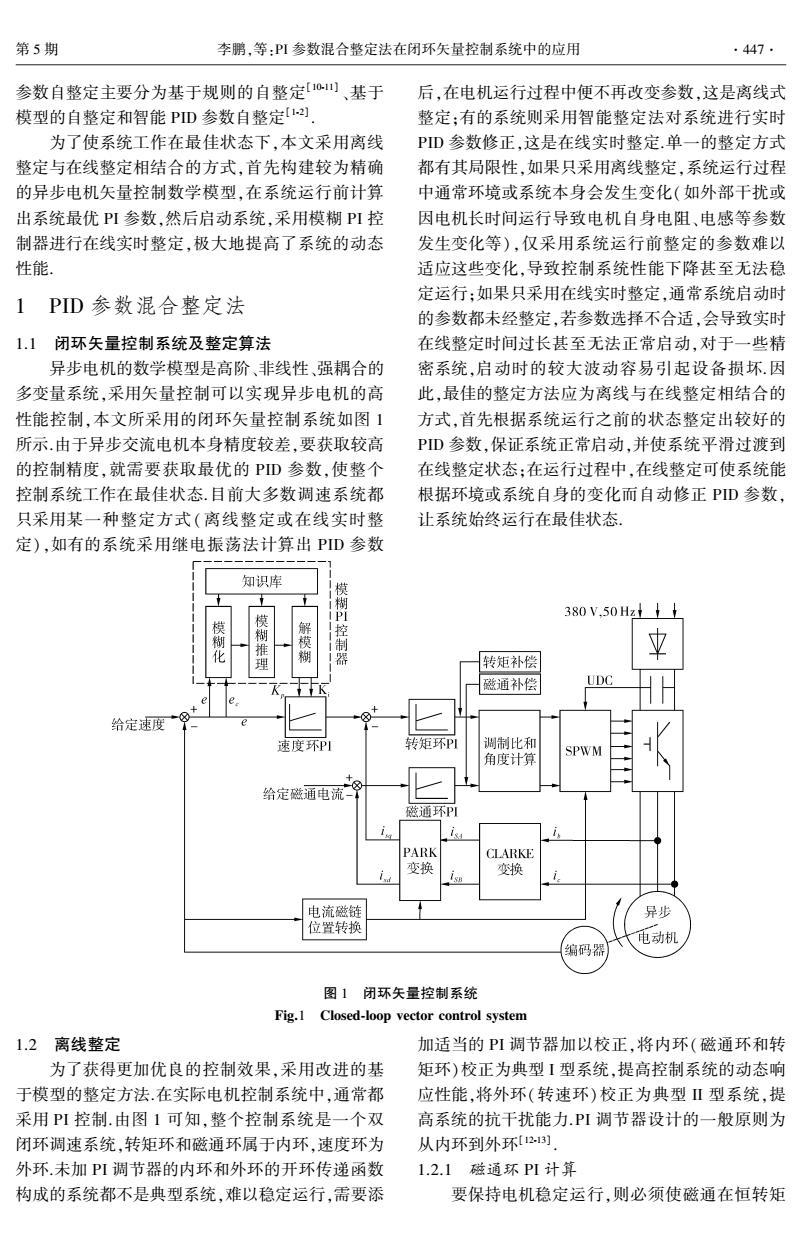
第5期 李鹏,等:PI参数混合整定法在闭环矢量控制系统中的应用 .447. 参数自整定主要分为基于规则的自整定[0山、基于 后,在电机运行过程中便不再改变参数,这是离线式 模型的自整定和智能PD参数自整定以 整定:有的系统则采用智能整定法对系统进行实时 为了使系统工作在最佳状态下,本文采用离线 PD参数修正,这是在线实时整定.单一的整定方式 整定与在线整定相结合的方式,首先构建较为精确 都有其局限性,如果只采用离线整定,系统运行过程 的异步电机矢量控制数学模型,在系统运行前计算 中通常环境或系统本身会发生变化(如外部干扰或 出系统最优PI参数,然后启动系统,采用模糊PI控 因电机长时间运行导致电机自身电阻、电感等参数 制器进行在线实时整定,极大地提高了系统的动态 发生变化等),仅采用系统运行前整定的参数难以 性能, 适应这些变化,导致控制系统性能下降甚至无法稳 定运行:如果只采用在线实时整定,通常系统启动时 1PID参数混合整定法 的参数都未经整定,若参数选择不合适,会导致实时 1.1闭环矢量控制系统及整定算法 在线整定时间过长甚至无法正常启动,对于一些精 异步电机的数学模型是高阶、非线性、强耦合的 密系统,启动时的较大波动容易引起设备损坏因 多变量系统,采用矢量控制可以实现异步电机的高 此,最佳的整定方法应为离线与在线整定相结合的 性能控制,本文所采用的闭环矢量控制系统如图1 方式,首先根据系统运行之前的状态整定出较好的 所示.由于异步交流电机本身精度较差,要获取较高 PD参数,保证系统正常启动,并使系统平滑过渡到 的控制精度,就需要获取最优的PD参数,使整个 在线整定状态:在运行过程中,在线整定可使系统能 控制系统工作在最佳状态.目前大多数调速系统都 根据环境或系统自身的变化而自动修正PD参数, 只采用某一种整定方式(离线整定或在线实时整 让系统始终运行在最佳状态, 定),如有的系统采用继电振荡法计算出PID参数 知识库 模 380V,50Hz 模制化 模糊推理 解模糊 控制器 转矩补偿 磁通补偿 UDC 给定速度 速度环PI 转矩环P 调制比和 角度计算 SPWM 区 给定磁通电流 磁通环P川 PARK CLARKE 变换 变换 电流磁链 异步 位置转换 电动机 编码器 图1闭环矢量控制系统 Fig.1 Closed-loop vector control system 1.2离线整定 加适当的PI调节器加以校正,将内环(磁通环和转 为了获得更加优良的控制效果,采用改进的基 矩环)校正为典型1型系统,提高控制系统的动态响 于模型的整定方法.在实际电机控制系统中,通常都 应性能,将外环(转速环)校正为典型Ⅱ型系统,提 采用PI控制.由图1可知,整个控制系统是一个双 高系统的抗干扰能力.PI调节器设计的一般原则为 闭环调速系统,转矩环和磁通环属于内环,速度环为 从内环到外环2) 外环.未加PI调节器的内环和外环的开环传递函数 1.2.1磁通环PI计算 构成的系统都不是典型系统,难以稳定运行,需要添 要保持电机稳定运行,则必须使磁通在恒转矩参数自整定主要分为基于规则的自整定[10 ̄11] 、基于 模型的自整定和智能 PID 参数自整定[1 ̄2] . 为了使系统工作在最佳状态下ꎬ本文采用离线 整定与在线整定相结合的方式ꎬ首先构建较为精确 的异步电机矢量控制数学模型ꎬ在系统运行前计算 出系统最优 PI 参数ꎬ然后启动系统ꎬ采用模糊 PI 控 制器进行在线实时整定ꎬ极大地提高了系统的动态 性能. 1 PID 参数混合整定法 1.1 闭环矢量控制系统及整定算法 异步电机的数学模型是高阶、非线性、强耦合的 多变量系统ꎬ采用矢量控制可以实现异步电机的高 性能控制ꎬ本文所采用的闭环矢量控制系统如图 1 所示.由于异步交流电机本身精度较差ꎬ要获取较高 的控制精度ꎬ就需要获取最优的 PID 参数ꎬ使整个 控制系统工作在最佳状态.目前大多数调速系统都 只采用某一种整定方式(离线整定或在线实时整 定)ꎬ如有的系统采用继电振荡法计算出 PID 参数 后ꎬ在电机运行过程中便不再改变参数ꎬ这是离线式 整定ꎻ有的系统则采用智能整定法对系统进行实时 PID 参数修正ꎬ这是在线实时整定.单一的整定方式 都有其局限性ꎬ如果只采用离线整定ꎬ系统运行过程 中通常环境或系统本身会发生变化(如外部干扰或 因电机长时间运行导致电机自身电阻、电感等参数 发生变化等)ꎬ仅采用系统运行前整定的参数难以 适应这些变化ꎬ导致控制系统性能下降甚至无法稳 定运行ꎻ如果只采用在线实时整定ꎬ通常系统启动时 的参数都未经整定ꎬ若参数选择不合适ꎬ会导致实时 在线整定时间过长甚至无法正常启动ꎬ对于一些精 密系统ꎬ启动时的较大波动容易引起设备损坏.因 此ꎬ最佳的整定方法应为离线与在线整定相结合的 方式ꎬ首先根据系统运行之前的状态整定出较好的 PID 参数ꎬ保证系统正常启动ꎬ并使系统平滑过渡到 在线整定状态ꎻ在运行过程中ꎬ在线整定可使系统能 根据环境或系统自身的变化而自动修正 PID 参数ꎬ 让系统始终运行在最佳状态. 图 1 闭环矢量控制系统 Fig.1 Closed ̄loop vector control system 1.2 离线整定 为了获得更加优良的控制效果ꎬ采用改进的基 于模型的整定方法.在实际电机控制系统中ꎬ通常都 采用 PI 控制.由图 1 可知ꎬ整个控制系统是一个双 闭环调速系统ꎬ转矩环和磁通环属于内环ꎬ速度环为 外环.未加 PI 调节器的内环和外环的开环传递函数 构成的系统都不是典型系统ꎬ难以稳定运行ꎬ需要添 加适当的 PI 调节器加以校正ꎬ将内环(磁通环和转 矩环)校正为典型 I 型系统ꎬ提高控制系统的动态响 应性能ꎬ将外环(转速环)校正为典型 II 型系统ꎬ提 高系统的抗干扰能力.PI 调节器设计的一般原则为 从内环到外环[12 ̄13] . 1.2.1 磁通环 PI 计算 要保持电机稳定运行ꎬ则必须使磁通在恒转矩 第 5 期 李鹏ꎬ等:PI 参数混合整定法在闭环矢量控制系统中的应用 447