正在加载图片...
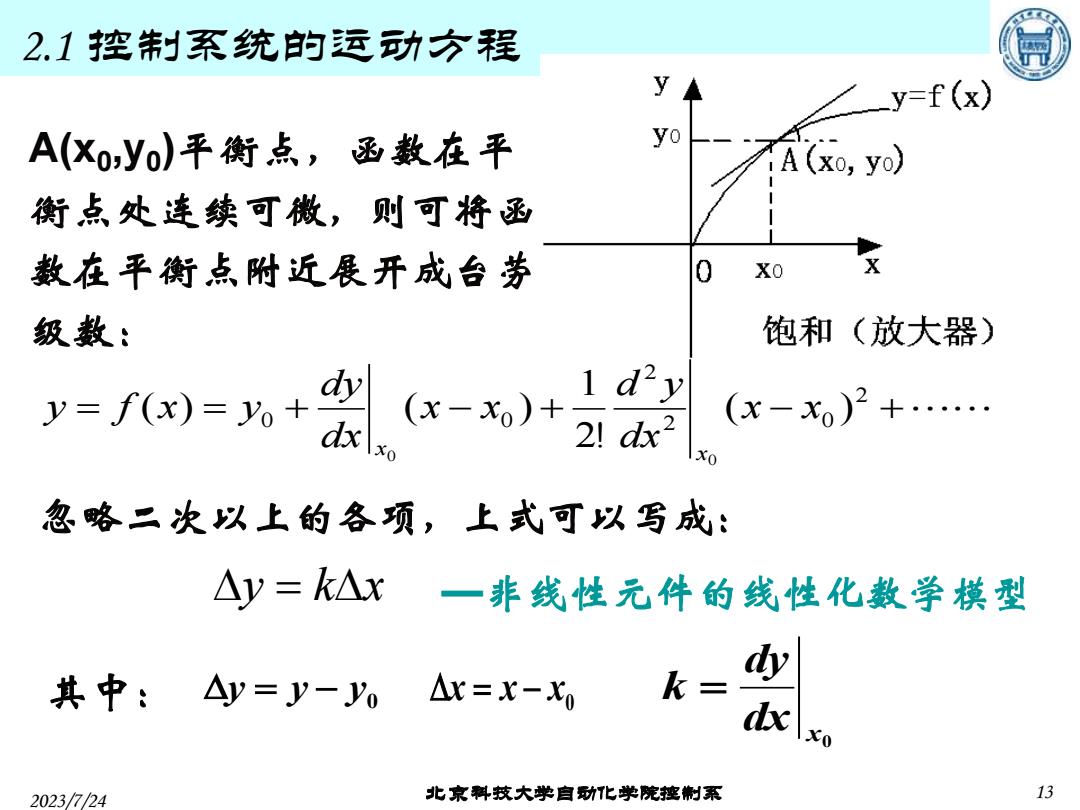
2.1控制系统的运功方程 y=f(x) A(Xoyo)平衡点,函数在平 yo A (xo,yo) 衡点处连续可微,则可将函 数在平衡点附近展开成台劳 XO X 级数: 饱和(放大器) y=f()=⅓+ dx (x-x)+ 1d'y 21dk2 (x-x0)2+. 忽略二次以上的各项,上式可以写成: △y=k△x一非线性元件的线性化数学模型 y 其中:△y=y-yo △x=X-Xo k= dx 2023/724 北京料技大学自功化学院控制系 132023/7/24 北京科技大学自动化学院控制系 13 2.1 控制系统的运动方程 = = + − + 2 − 0 2 + 2 0 0 ( ) 2! 1 ( ) ( ) 0 0 x x dx d y x x dx dy y f x y x x 0 y = y − y 0 x = x − x x0 dx dy k = 忽略二次以上的各项,上式可以写成: A(x0 ,y0 )平衡点,函数在平 衡点处连续可微,则可将函 数在平衡点附近展开成台劳 级数: y = kx 其中: —非线性元件的线性化数学模型