正在加载图片...
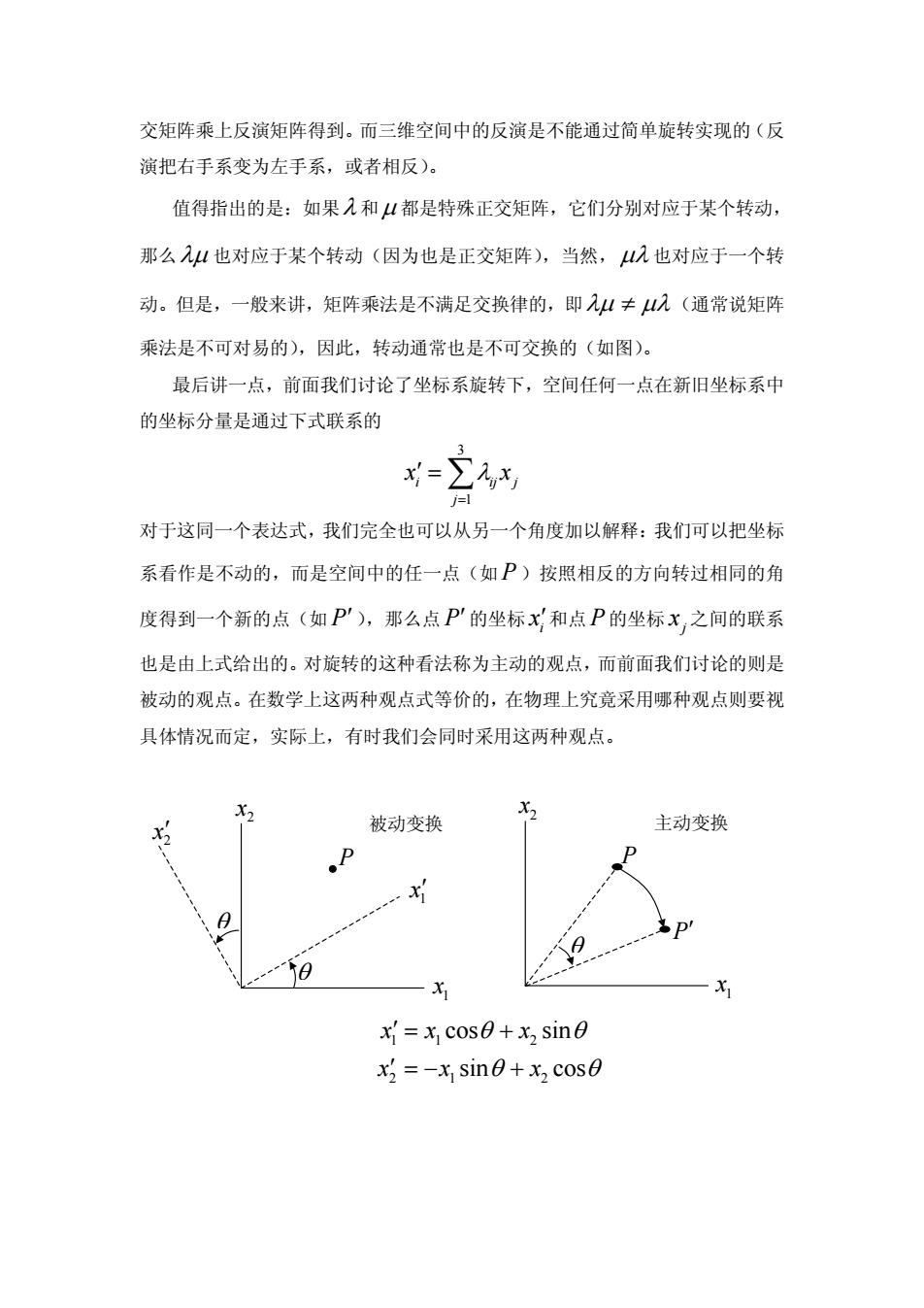
交矩阵乘上反演矩阵得到。而三维空间中的反演是不能通过简单旋转实现的(反 演把右手系变为左手系,或者相反)。 值得指出的是:如果入和山都是特殊正交矩阵,它们分别对应于某个转动, 那么山也对应于某个转动(因为也是正交矩阵),当然,山几也对应于一个转 动。但是,一般来讲,矩阵乘法是不满足交换律的,即几山≠山几(通常说矩阵 乘法是不可对易的),因此,转动通常也是不可交换的(如图)。 最后讲一点,前面我们讨论了坐标系旋转下,空间任何一点在新旧坐标系中 的坐标分量是通过下式联系的 = j= 对于这同一个表达式,我们完全也可以从另一个角度加以解释:我们可以把坐标 系看作是不动的,而是空间中的任一点(如P)按照相反的方向转过相同的角 度得到一个新的点(如P'),那么点P'的坐标x和点P的坐标x,之间的联系 也是由上式给出的。对旋转的这种看法称为主动的观点,而前面我们讨论的则是 被动的观点。在数学上这两种观点式等价的,在物理上究竟采用哪种观点则要视 具体情况而定,实际上,有时我们会同时采用这两种观点。 被动变换 主动变换 ●ò e X x=x cos+x sine x,=-xsin0+x2cosθ交矩阵乘上反演矩阵得到。而三维空间中的反演是不能通过简单旋转实现的(反 演把右手系变为左手系,或者相反)。 值得指出的是:如果λ 和μ 都是特殊正交矩阵,它们分别对应于某个转动, 那么λμ 也对应于某个转动(因为也是正交矩阵),当然, μλ 也对应于一个转 动。但是,一般来讲,矩阵乘法是不满足交换律的,即λμ μ ≠ λ(通常说矩阵 乘法是不可对易的),因此,转动通常也是不可交换的(如图)。 最后讲一点,前面我们讨论了坐标系旋转下,空间任何一点在新旧坐标系中 的坐标分量是通过下式联系的 3 1 i i j j j x λ x = ′ = ∑ 对于这同一个表达式,我们完全也可以从另一个角度加以解释:我们可以把坐标 系看作是不动的,而是空间中的任一点(如 P )按照相反的方向转过相同的角 度得到一个新的点(如 P′),那么点 P′的坐标 i x ′和点 P 的坐标 j x 之间的联系 也是由上式给出的。对旋转的这种看法称为主动的观点,而前面我们讨论的则是 被动的观点。在数学上这两种观点式等价的,在物理上究竟采用哪种观点则要视 具体情况而定,实际上,有时我们会同时采用这两种观点。 1 x 2 x 1 x ′ 2 x ′ θ θ P θ P′ 1 x 2 x P 11 2 21 2 cos sin sin cos xx x xx x θ θ θ θ ′ = + ′ =− + 被动变换 主动变换