正在加载图片...
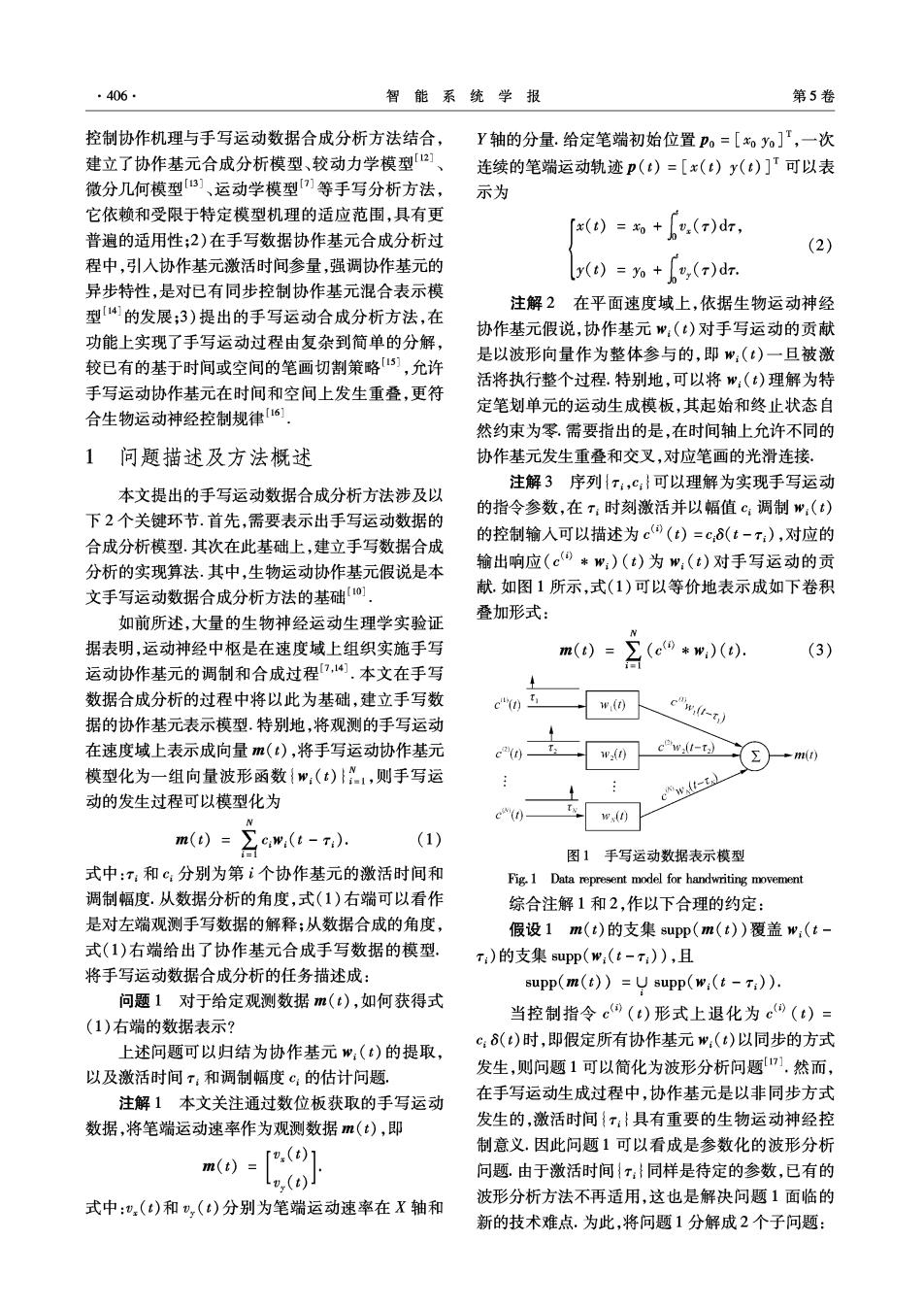
·406 智能系统学报 第5卷 控制协作机理与手写运动数据合成分析方法结合, Y轴的分量.给定笔端初始位置po=[x0yo]I,一次 建立了协作基元合成分析模型、较动力学模型] 连续的笔端运动轨迹p(t)=[x(t)y(t)]T可以表 微分几何模型、运动学模型]等手写分析方法, 示为 它依赖和受限于特定模型机理的适应范围,具有更 「x(t) 普遍的适用性;2)在手写数据协作基元合成分析过 =+.()dr, (2) 程中,引入协作基元激活时间参量,强调协作基元的 ()=为+,(r)dr 异步特性,是对已有同步控制协作基元混合表示模 注解2在平面速度域上,依据生物运动神经 型4的发展;3)提出的手写运动合成分析方法,在 协作基元假说,协作基元:(t)对手写运动的贡献 功能上实现了手写运动过程由复杂到简单的分解, 较已有的基于时间或空间的笔画切割策略],允许 是以波形向量作为整体参与的,即w:()一旦被激 活将执行整个过程.特别地,可以将":(t)理解为特 手写运动协作基元在时间和空间上发生重叠,更符 合生物运动神经控制规律16] 定笔划单元的运动生成模板,其起始和终止状态自 然约束为零.需要指出的是,在时间轴上允许不同的 1问题描述及方法概述 协作基元发生重叠和交叉,对应笔画的光滑连接。 注解3序列{T:,c:}可以理解为实现手写运动 本文提出的手写运动数据合成分析方法涉及以 的指令参数,在T:时刻激活并以幅值c:调制:(t) 下2个关键环节.首先,需要表示出手写运动数据的 的控制输入可以描述为c(t)=c,6(t-T:),对应的 合成分析模型.其次在此基础上,建立手写数据合成 分析的实现算法.其中,生物运动协作基元假说是本 输出响应(c⑧*w:)(t)为w:(t)对手写运动的贡 文手写运动数据合成分析方法的基础0 献.如图1所示,式(1)可以等价地表示成如下卷积 如前所述,大量的生物神经运动生理学实验证 叠加形式: 据表明,运动神经中枢是在速度域上组织实施手写 m(t)= (c*w)(t) (3) 运动协作基元的调制和合成过程?,.本文在手写 数据合成分析的过程中将以此为基础,建立手写数 c() () 据的协作基元表示模型.特别地,将观测的手写运动 c"w:(t-7) 在速度域上表示成向量m(:),将手写运动协作基元 c2(t) cw(t-t》 w() 模型化为一组向量波形函数{w:(t)1,则手写运 动的发生过程可以模型化为 cwk-》 e""(t w(0 m(t)=】 ∑cw(t-T). (1) 图1手写运动数据表示模型 式中:T:和c:分别为第i个协作基元的激活时间和 Fig.1 Data represent model for handwriting movement 调制幅度,从数据分析的角度,式(1)右端可以看作 综合注解1和2,作以下合理的约定: 是对左端观测手写数据的解释;从数据合成的角度, 假设1m(t)的支集supp(m(t))覆盖w:(t- 式(1)右端给出了协作基元合成手写数据的模型. T)的支集supp(w:(t-T:),且 将手写运动数据合成分析的任务描述成: supp(m(t))=U supp(wi(t-T;)). 问题1对于给定观测数据m(t),如何获得式 当控制指令c0(t)形式上退化为c0(t)= (1)右端的数据表示? ℃:6(t)时,即假定所有协作基元w:(t)以同步的方式 上述问题可以归结为协作基元w:(t)的提取, 以及激活时间r:和调制幅度c:的估计问题。 发生,则问题1可以简化为波形分析问题1.然而, 注解1本文关注通过数位板获取的手写运动 在手写运动生成过程中,协作基元是以非同步方式 数据,将笔端运动速率作为观测数据m(t),即 发生的,激活时间{T:}具有重要的生物运动神经控 制意义,因此问题1可以看成是参数化的波形分析 m(t)= 「(t)1 L,(t) 问题.由于激活时间{T:}同样是待定的参数,已有的 波形分析方法不再适用,这也是解决问题1面临的 式中:v(t)和v,()分别为笔端运动速率在X轴和 新的技术难点.为此,将问题1分解成2个子问题: