正在加载图片...
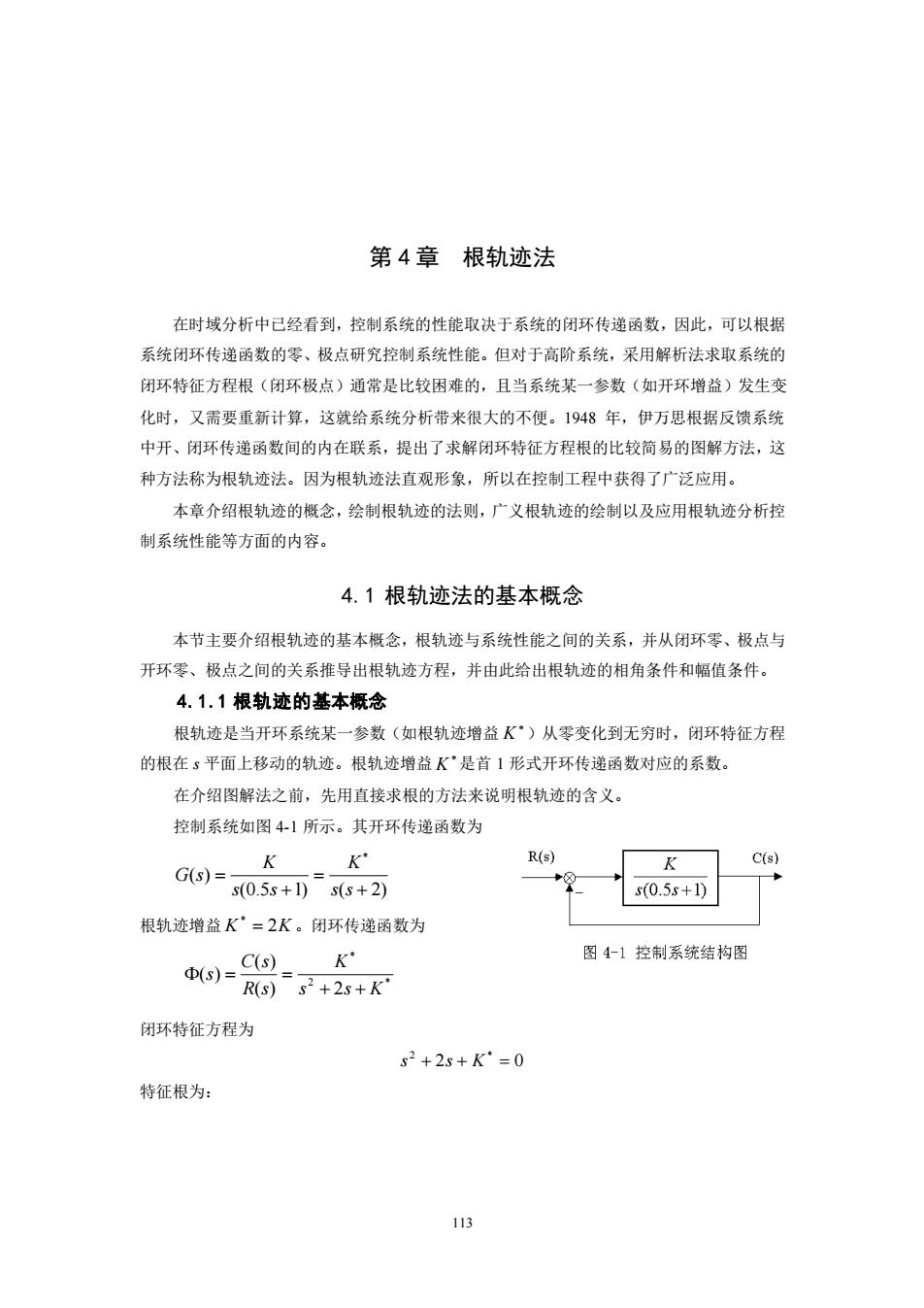
第4章根轨迹法 在时域分析中已经看到,控制系统的性能取决于系统的闭环传递函数,因此,可以根据 系统闭环传递函数的零、极点研究控制系统性能。但对于高阶系统,采用解析法求取系统的 闭环特征方程根(闭环极点)通常是比较困难的,且当系统某一参数(如开环增益)发生变 化时,又需要重新计算,这就给系统分析带来很大的不便。1948年,伊万思根据反馈系统 中开、闭环传递函数间的内在联系,提出了求解闭环特征方程根的比较简易的图解方法,这 种方法称为根轨迹法。因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。 本章介绍根轨迹的概念,绘制根轨迹的法则,广义根轨迹的绘制以及应用根轨迹分析控 制系统性能等方面的内容。 4.1根轨迹法的基本概念 本节主要介绍根轨迹的基本概念,根轨迹与系统性能之间的关系,并从闭环零、极点与 开环零、极点之间的关系推导出根轨迹方程,并由此给出根轨迹的相角条件和幅值条件。 4.1.1根轨迹的基本概念 根轨迹是当开环系统某一参数(如根轨迹增益K·)从零变化到无穷时,闭环特征方程 的根在s平面上移动的轨迹。根轨迹增益K~是首1形式开环传递函数对应的系数。 在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。 控制系统如图4-1所示。其开环传递函数为 K K R(s) C(s) G)=s05s+0ss+2 s0.5s+1) 根轨迹增益K”=2K。闭环传递函数为 0-8, K' 图41控制系统结构图 闭环特征方程为 52+2s+K*=0 特征根为: 113 113 第 4 章 根轨迹法 在时域分析中已经看到,控制系统的性能取决于系统的闭环传递函数,因此,可以根据 系统闭环传递函数的零、极点研究控制系统性能。但对于高阶系统,采用解析法求取系统的 闭环特征方程根(闭环极点)通常是比较困难的,且当系统某一参数(如开环增益)发生变 化时,又需要重新计算,这就给系统分析带来很大的不便。1948 年,伊万思根据反馈系统 中开、闭环传递函数间的内在联系,提出了求解闭环特征方程根的比较简易的图解方法,这 种方法称为根轨迹法。因为根轨迹法直观形象,所以在控制工程中获得了广泛应用。 本章介绍根轨迹的概念,绘制根轨迹的法则,广义根轨迹的绘制以及应用根轨迹分析控 制系统性能等方面的内容。 4.1 根轨迹法的基本概念 本节主要介绍根轨迹的基本概念,根轨迹与系统性能之间的关系,并从闭环零、极点与 开环零、极点之间的关系推导出根轨迹方程,并由此给出根轨迹的相角条件和幅值条件。 4.1.1 根轨迹的基本概念 根轨迹是当开环系统某一参数(如根轨迹增益 K )从零变化到无穷时,闭环特征方程 的根在 s 平面上移动的轨迹。根轨迹增益 K 是首 1 形式开环传递函数对应的系数。 在介绍图解法之前,先用直接求根的方法来说明根轨迹的含义。 控制系统如图 4-1 所示。其开环传递函数为 (0.5 1) ( 2) ( ) * + = + = s s K s s K G s 根轨迹增益 K 2K * = 。闭环传递函数为 2 * * ( ) 2 ( ) ( ) s s K K R s C s s + + = = 闭环特征方程为 2 0 2 * s + s + K = 特征根为: