正在加载图片...
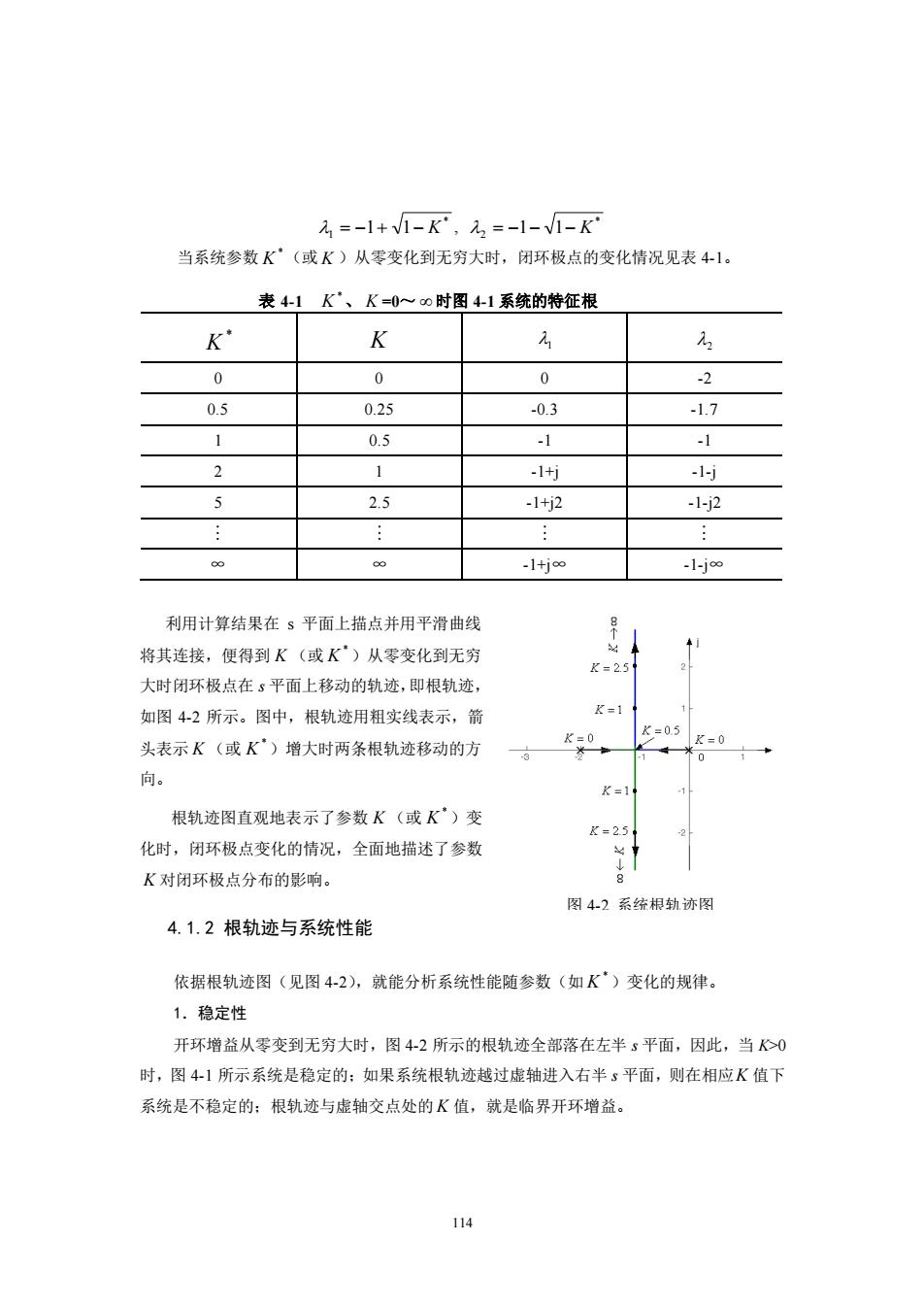
2=-1+1-K,2=-1-1-K 当系统参数K·(或K)从零变化到无穷大时,闭环极点的变化情况见表41。 表41K、K=0~0时图41系统的特征根 K 0 0 0 .2 0.5 0.25 -0.3 -1.7 1 0.5 2 25 -1+i2 .1-2 : 00 P -1+i∞ -1-joo 利用计算结果在s平面上描点并用平滑曲线 将其连接,便得到K(或K)从零变化到无穷 =25 大时闭环极点在s平面上移动的轨迹,即根轨迹, 如图42所示。图中,根轨迹用粗实线表示,箭 E=1 K=05 头表示K(或K)增大时两条根轨迹移动的方 1 向。 根轨迹图直观地表示了参数K(或K)变 K=25 化时,闭环极点变化的情况,全面地描述了参数 K对闭环极点分布的影响。 图42系统根轨迹图 4.1.2根轨迹与系统性能 依据根轨迹图(见图4-2),就能分析系统性能随参数(如K·)变化的规律 1.稳定性 开环增益从零变到无穷大时,图42所示的根轨迹全部落在左半s平面,因此,当心0 时,图41所示系统是稳定的:如果系统根轨迹越过虚轴进入右半s平面,则在相应K值下 系统是不稳定的:根轨迹与虚轴交点处的K值,就是临界开环增益 114114 * 1 = −1+ 1− K , * 2 = −1− 1− K 当系统参数 * K (或 K )从零变化到无穷大时,闭环极点的变化情况见表 4-1。 表 4-1 * K 、 K =0~ 时图 4-1 系统的特征根 * K K 1 2 0 0 0 -2 0.5 0.25 -0.3 -1.7 1 0.5 -1 -1 2 1 -1+j -1-j 5 2.5 -1+j2 -1-j2 ∞ ∞ -1+j∞ -1-j∞ 利用计算结果在 s 平面上描点并用平滑曲线 将其连接,便得到 K (或 * K )从零变化到无穷 大时闭环极点在 s 平面上移动的轨迹,即根轨迹, 如图 4-2 所示。图中,根轨迹用粗实线表示,箭 头表示 K (或 * K )增大时两条根轨迹移动的方 向。 根轨迹图直观地表示了参数 K (或 * K )变 化时,闭环极点变化的情况,全面地描述了参数 K 对闭环极点分布的影响。 4.1.2 根轨迹与系统性能 依据根轨迹图(见图 4-2),就能分析系统性能随参数(如 * K )变化的规律。 1.稳定性 开环增益从零变到无穷大时,图 4-2 所示的根轨迹全部落在左半 s 平面,因此,当 K>0 时,图 4-1 所示系统是稳定的;如果系统根轨迹越过虚轴进入右半 s 平面,则在相应 K 值下 系统是不稳定的;根轨迹与虚轴交点处的 K 值,就是临界开环增益。 图 4-2 系统根轨迹图