正在加载图片...
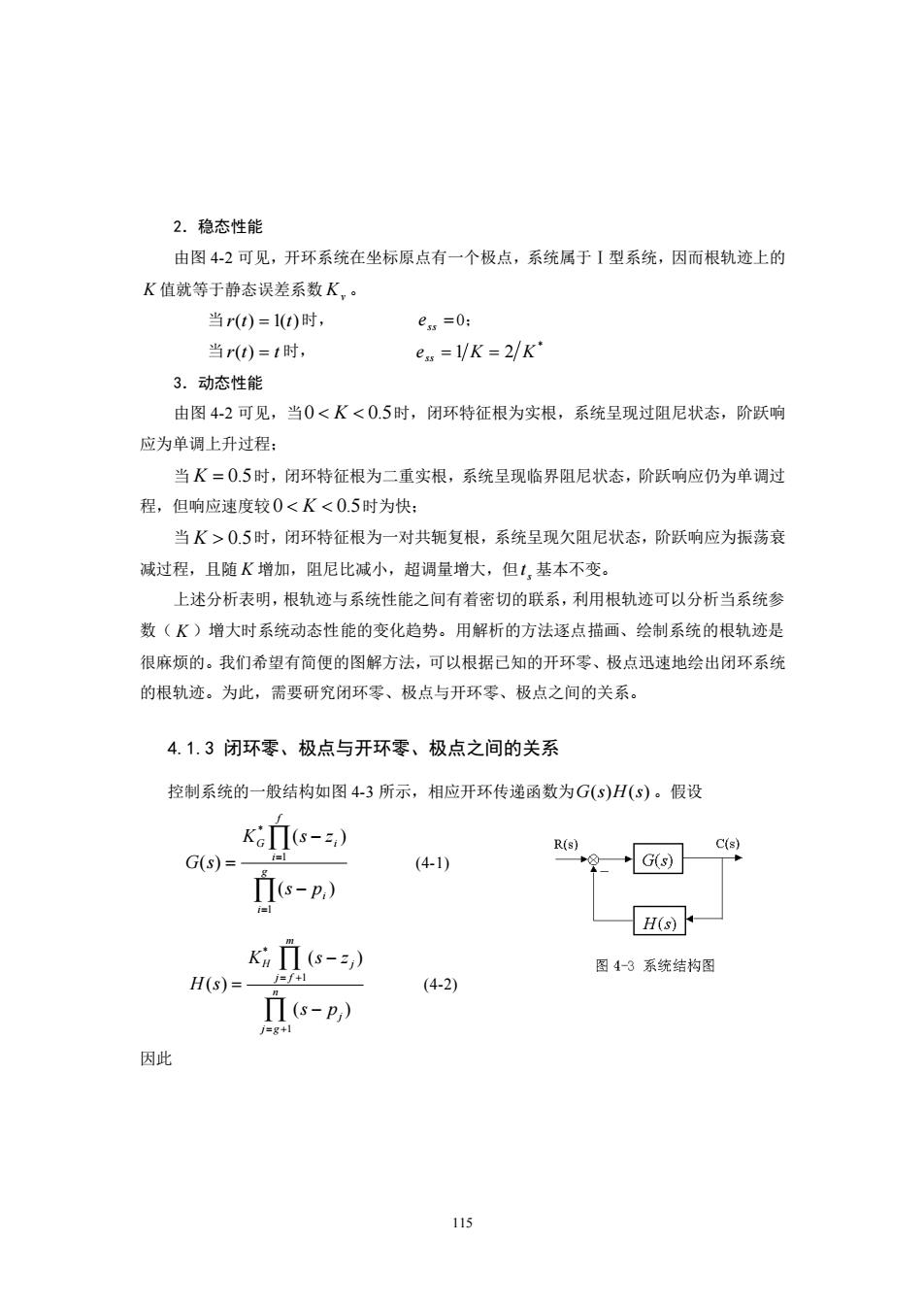
2.稳态性能 由图4-2可见,开环系统在坐标原点有一个极点,系统属于1型系统,因而根轨迹上的 K值就等于静态误差系数K。 当)=10)时, ea=0: 当r(0)=1时, en=l/K=2/K' 3.动态性能 由图42可见,当0<K<0.5时,闭环特征根为实根,系统呈现过阻尼状态,阶跃响 应为单调上升过程: 当K=0.5时,闭环特征根为二重实根,系统呈现临界阻尼状态,阶跃响应仍为单调过 程,但响应速度较0<K<0.5时为快: 当K>0.5时,闭环特征根为一对共轭复根,系统呈现欠阻尼状态,阶跃响应为振荡衰 减过程,且随K增加,阻尼比减小,超调量增大,但1,基本不变。 上述分析表明,根轨迹与系统性能之间有者密切的联系,利用根轨迹可以分析当系统参 数(K)增大时系统动态性能的变化趋势。用解析的方法逐点描画、绘制系统的根轨迹是 很麻烦的。我们希望有简便的图解方法,可以根据已知的开环零、极点迅速地绘出闭环系统 的根轨迹。为此,需要研究闭环零、极点与开环零、极点之间的关系。 4.1.3闭环零、极点与开环零、极点之间的关系 控制系统的一般结构如图43所示,相应开环传递函数为G(s)H(s)。假设 KGΠ(s-) R(s) G(s)= (4-1) c4 s-p,) H() Ki II(s-= 图43系统结构图 H(s)= (4-2) II(s-e) 因此 115 115 2.稳态性能 由图 4-2 可见,开环系统在坐标原点有一个极点,系统属于Ⅰ型系统,因而根轨迹上的 K 值就等于静态误差系数 Kv 。 当 r(t) = 1(t) 时, ess = 0; 当 r(t) = t 时, * ess = 1 K = 2 K 3.动态性能 由图 4-2 可见,当 0 K 0.5 时,闭环特征根为实根,系统呈现过阻尼状态,阶跃响 应为单调上升过程; 当 K = 0.5 时,闭环特征根为二重实根,系统呈现临界阻尼状态,阶跃响应仍为单调过 程,但响应速度较 0 K 0.5 时为快; 当 K 0.5 时,闭环特征根为一对共轭复根,系统呈现欠阻尼状态,阶跃响应为振荡衰 减过程,且随 K 增加,阻尼比减小,超调量增大,但 s t 基本不变。 上述分析表明,根轨迹与系统性能之间有着密切的联系,利用根轨迹可以分析当系统参 数( K )增大时系统动态性能的变化趋势。用解析的方法逐点描画、绘制系统的根轨迹是 很麻烦的。我们希望有简便的图解方法,可以根据已知的开环零、极点迅速地绘出闭环系统 的根轨迹。为此,需要研究闭环零、极点与开环零、极点之间的关系。 4.1.3 闭环零、极点与开环零、极点之间的关系 控制系统的一般结构如图 4-3 所示,相应开环传递函数为 G(s)H(s) 。假设 = = − − = g i i f i G i s p K s z G s 1 1 * ( ) ( ) ( ) (4-1) * 1 1 ( ) ( ) ( ) m H j j f n j j g K s z H s s p = + = + − = − (4-2) 因此