正在加载图片...
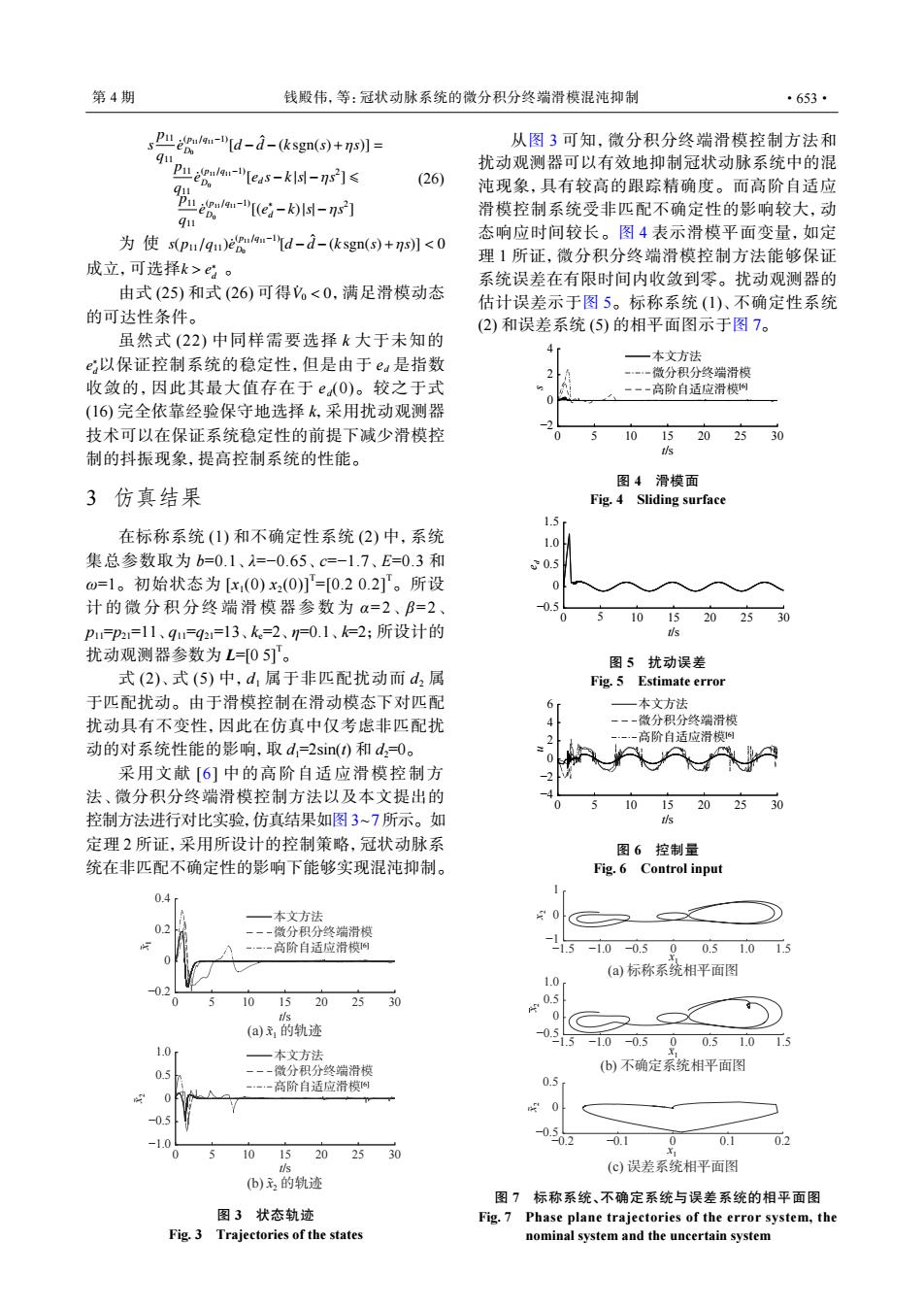
第4期 钱殿伟,等:冠状动脉系统的微分积分终端滑模混沌抑制 ·653· P四elam-"[d-i-(ksgn(s)+7s刃= 从图3可知,微分积分终端滑模控制方法和 q11 四em-"[eus-k-ns]≤ 扰动观测器可以有效地抑制冠状动脉系统中的混 (26) 会me--np】 沌现象,具有较高的跟踪精确度。而高阶自适应 滑模控制系统受非匹配不确定性的影响较大,动 q11 为使sp/q)%au-"d-d-(ksgn(s)+s】<0 态响应时间较长。图4表示滑模平面变量,如定 理1所证,微分积分终端滑模控制方法能够保证 成立,可选择k>e。 系统误差在有限时间内收敛到零。扰动观测器的 由式(25)和式(26)可得<0,满足滑模动态 估计误差示于图5。标称系统(1)、不确定性系统 的可达性条件。 (2)和误差系统(⑤)的相平面图示于图7。 虽然式(22)中同样需要选择k大于未知的 e以保证控制系统的稳定性,但是由于ea是指数 一本文方法 --微分积分终端滑模 收敛的,因此其最大值存在于e(O)。较之于式 --高阶自适应滑模向 (16)完全依靠经验保守地选择k,采用扰动观测器 0 技术可以在保证系统稳定性的前提下减少滑模控 0 5 1015202530 制的抖振现象,提高控制系统的性能。 图4滑模面 3仿真结果 Fig.4 Sliding surface 1.5 在标称系统(1)和不确定性系统(2)中,系统 1.0 集总参数取为b=0.1、=-0.65、c=-1.7、E=0.3和 0.5 o=1。初始状态为[x(0)x2(0)]=[0.20.2]。所设 计的微分积分终端滑模器参数为a=2、B=2、 05 0 5 1015 202530 P1=P21=11、91=921=13、ke=2、=0.1、k=2;所设计的 s 扰动观测器参数为L=05]'。 图5扰动误差 式(2)、式(5)中,d1属于非匹配扰动而d2属 Fig.5 Estimate error 于匹配扰动。由于滑模控制在滑动模态下对匹配 6 本文方法 扰动具有不变性,因此在仿真中仅考虑非匹配扰 ---微分积分终端滑模 -高阶自适应滑模6例 动的对系统性能的影响,取d,=2sin()和d=0。 采用文献[6]中的高阶自适应滑模控制方 法、微分积分终端滑模控制方法以及本文提出的 5 10 15 20 2530 控制方法进行对比实验,仿真结果如图3~7所示。如 定理2所证,采用所设计的控制策略,冠状动脉系 图6控制量 统在非匹配不确定性的影响下能够实现混沌抑制。 Fig.6 Control input 0.4 本文方法 0 02 -一-微分积分终端滑模 -1 -·-…-高阶自适应滑模 1.5-1.0-0.500.51.01.3 0 (a)标称系统相平面图 1.0 02 0 10 15 20 25 30 0 (a)元的轨迹 0. 21.5-1.0-0.500.51.01.5 1.0 本文方法 微分积分终端滑模 (b)不确定系统相平面图 高阶自适应滑模 0.5 0 0 0.5 -1.0 062 0.1 0.1 3 0 5 10 1520 25 30 (c)误差系统相平面图 (b)的轨迹 图7标称系统、不确定系统与误差系统的相平面图 图3状态轨迹 Fig.7 Phase plane trajectories of the error system,the Fig.3 Trajectories of the states nominal system and the uncertain systems p11 q11 e˙ (p11/q11−1) D0 [d −dˆ−(k sgn(s)+ηs)] = p11 q11 e˙ (p11/q11−1) D0 [ed s−k |s|−ηs 2 ] ⩽ p11 q11 e˙ (p11/q11−1) D0 [(e ∗ d −k)|s|−ηs 2 ] (26) s(p11/q11)˙e (p11/q11−1) D0 [d −dˆ−(k sgn(s)+ηs)] < 0 k > e ∗ d 为 使 成立,可选择 。 V˙ 由式 (25) 和式 (26) 可得 0 < 0 ,满足滑模动态 的可达性条件。 e ∗ d 虽然式 (22) 中同样需要选择 k 大于未知的 以保证控制系统的稳定性,但是由于 ed 是指数 收敛的,因此其最大值存在于 ed (0)。较之于式 (16) 完全依靠经验保守地选择 k,采用扰动观测器 技术可以在保证系统稳定性的前提下减少滑模控 制的抖振现象,提高控制系统的性能。 3 仿真结果 在标称系统 (1) 和不确定性系统 (2) 中,系统 集总参数取为 b=0.1、λ=−0.65、c=−1.7、E=0.3 和 ω=1。初始状态为 [x1 (0) x2 (0)]T =[0.2 0.2]T。所设 计的微分积分终端滑模器参数 为 α= 2、 β= 2、 p11=p21=11、q11=q21=13、ke=2、η=0.1、k=2;所设计的 扰动观测器参数为 L=[0 5]T。 式 (2)、式 (5) 中,d1 属于非匹配扰动而 d2 属 于匹配扰动。由于滑模控制在滑动模态下对匹配 扰动具有不变性,因此在仿真中仅考虑非匹配扰 动的对系统性能的影响,取 d1=2sin(t) 和 d2=0。 采用文献 [6] 中的高阶自适应滑模控制方 法、微分积分终端滑模控制方法以及本文提出的 控制方法进行对比实验,仿真结果如图 3~7 所示。如 定理 2 所证,采用所设计的控制策略,冠状动脉系 统在非匹配不确定性的影响下能够实现混沌抑制。 0 5 10 15 20 25 30 t/s (a) x1 的轨迹 (b) x2 的轨迹 −0.2 0 0.2 0.4 本文方法 微分积分终端滑模 高阶自适应滑模[6] x1 ~ ~ ~ 本文方法 微分积分终端滑模 高阶自适应滑模[6] 0 5 10 15 20 25 30 t/s −1.0 −0.5 0 0.5 1.0 x2 ~ 图 3 状态轨迹 Fig. 3 Trajectories of the states 从图 3 可知,微分积分终端滑模控制方法和 扰动观测器可以有效地抑制冠状动脉系统中的混 沌现象,具有较高的跟踪精确度。而高阶自适应 滑模控制系统受非匹配不确定性的影响较大,动 态响应时间较长。图 4 表示滑模平面变量,如定 理 1 所证,微分积分终端滑模控制方法能够保证 系统误差在有限时间内收敛到零。扰动观测器的 估计误差示于图 5。标称系统 (1)、不确定性系统 (2) 和误差系统 (5) 的相平面图示于图 7。 0 5 10 15 20 25 30 t/s −2 0 2 4 s 本文方法 微分积分终端滑模 高阶自适应滑模[6] 图 4 滑模面 Fig. 4 Sliding surface 0 5 10 15 20 25 30 t/s −0.5 0 0.5 1.0 1.5 ed 图 5 扰动误差 Fig. 5 Estimate error 0 5 10 15 20 25 30 t/s −4 −2 0 2 4 6 u 本文方法 微分积分终端滑模 高阶自适应滑模[6] 图 6 控制量 Fig. 6 Control input −0.2 −0.1 0 0.1 0.2 −0.5 0 0.5 −1.5 −1.0 −0.5 0 0.5 1.0 1.5 −0.5 0 0.5 1.0 −1.5 −1.0 −0.5 0 0.5 1.0 1.5 −1 0 1 x2 x2 x1 (a) 标称系统相平面图 (b) 不确定系统相平面图 (c) 误差系统相平面图 x1 x2 ~ x1 图 7 标称系统、不确定系统与误差系统的相平面图 Fig. 7 Phase plane trajectories of the error system, the nominal system and the uncertain system 第 4 期 钱殿伟,等:冠状动脉系统的微分积分终端滑模混沌抑制 ·653·