正在加载图片...
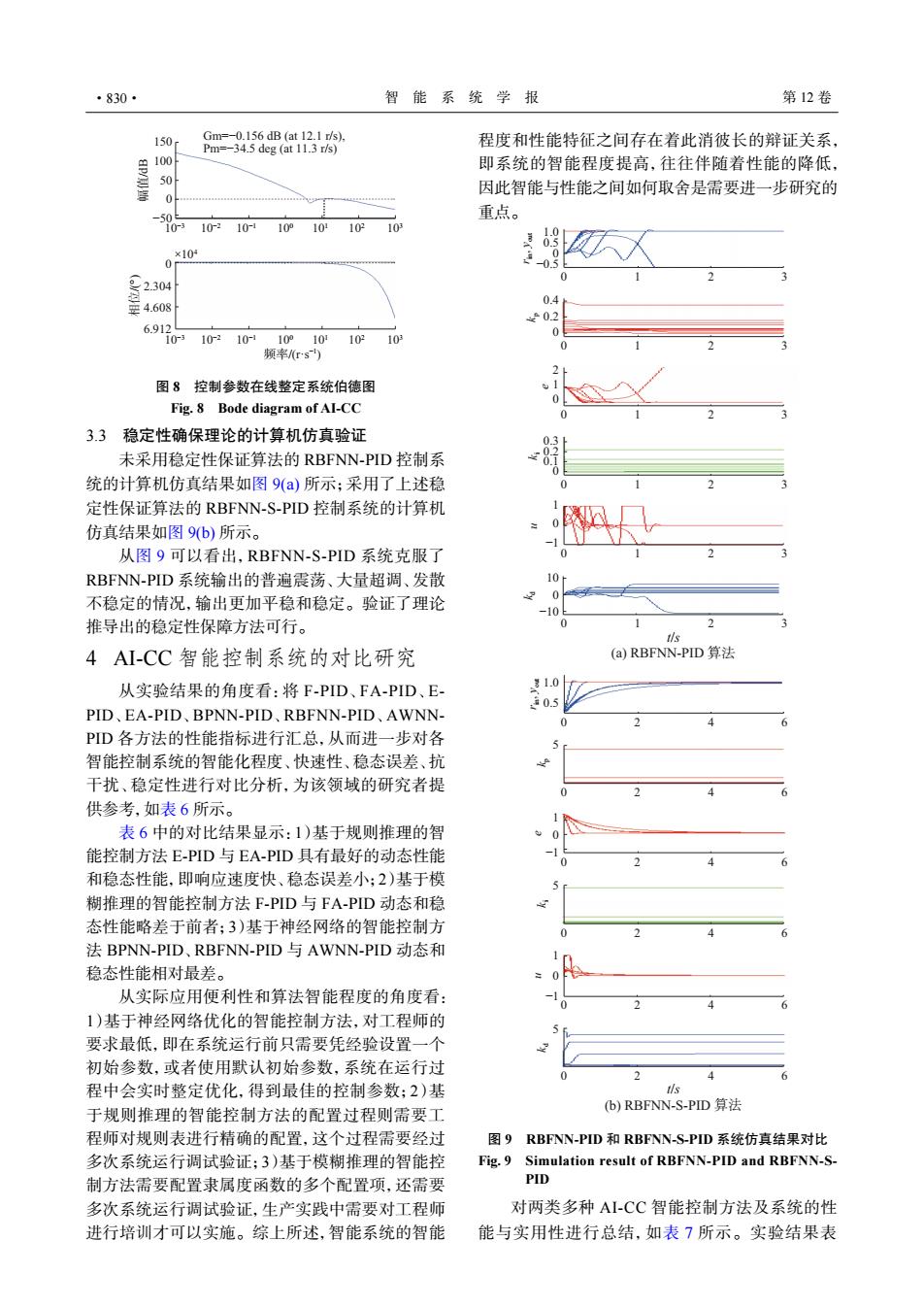
·830· 智能系统学报 第12卷 150 Gm=-0.156dB(at12.1s) Pm=-34.5 deg (at 11.3 r/s) 程度和性能特征之间存在着此消彼长的辩证关系, 100 即系统的智能程度提高,往往伴随着性能的降低, 50 因此智能与性能之间如何取舍是需要进一步研究的 0 -50 重点。 03 10-2 10- 10° 10 102 10 0 10 2.304 要4.608 403 6.912 0310210-10°101102101 0 频率rs 图8控制参数在线整定系统伯德图 Fig.8 Bode diagram of Al-CC 3.3稳定性确保理论的计算机仿真验证 未采用稳定性保证算法的RBFNN-PID控制系 统的计算机仿真结果如图9(a)所示;采用了上述稳 定性保证算法的RBFNN-S-PID控制系统的计算机 仿真结果如图9b)所示。 从图9可以看出,RBFNN-S-PID系统克服了 RBFNN-PID系统输出的普遍震荡、大量超调、发散 10 不稳定的情况,输出更加平稳和稳定。验证了理论 0 -10 推导出的稳定性保障方法可行。 2 4AI-CC智能控制系统的对比研究 (a)RBFNN-PID算法 从实验结果的角度看:将F-PID、FA-PID、E 31.0 09 PID、EA-PID、BPNN-PID、RBFNN-PID、AWNN- PD各方法的性能指标进行汇总,从而进一步对各 智能控制系统的智能化程度、快速性、稳态误差、抗 干扰、稳定性进行对比分析,为该领域的研究者提 供参考,如表6所示。 表6中的对比结果显示:1)基于规则推理的智 能控制方法E-PID与EA-PID具有最好的动态性能 和稳态性能,即响应速度快、稳态误差小;2)基于模 糊推理的智能控制方法F-PID与FA-PID动态和稳 态性能略差于前者:3)基于神经网络的智能控制方 法BPNN-PID、RBFNN-PID与AWNN-PID动态和 稳态性能相对最差。 从实际应用便利性和算法智能程度的角度看: 1)基于神经网络优化的智能控制方法,对工程师的 要求最低,即在系统运行前只需要凭经验设置一个 初始参数,或者使用默认初始参数,系统在运行过 程中会实时整定优化,得到最佳的控制参数;2)基 s 于规则推理的智能控制方法的配置过程则需要工 (b)RBFNN-S-PID算法 程师对规则表进行精确的配置,这个过程需要经过 图9 RBFNN-PID和RBFNN-S-PID系统仿真结果对比 多次系统运行调试验证;3)基于模糊推理的智能控 Fig.9 Simulation result of RBFNN-PID and RBFNN-S- 制方法需要配置隶属度函数的多个配置项,还需要 PID 多次系统运行调试验证,生产实践中需要对工程师 对两类多种AI-CC智能控制方法及系统的性 进行培训才可以实施。综上所述,智能系统的智能 能与实用性进行总结,如表7所示。实验结果表3.3 稳定性确保理论的计算机仿真验证 未采用稳定性保证算法的 RBFNN-PID 控制系 统的计算机仿真结果如图 9(a) 所示;采用了上述稳 定性保证算法的 RBFNN-S-PID 控制系统的计算机 仿真结果如图 9(b) 所示。 从图 9 可以看出,RBFNN-S-PID 系统克服了 RBFNN-PID 系统输出的普遍震荡、大量超调、发散 不稳定的情况,输出更加平稳和稳定。验证了理论 推导出的稳定性保障方法可行。 4 AI-CC 智能控制系统的对比研究 从实验结果的角度看:将 F-PID、FA-PID、EPID、EA-PID、BPNN-PID、RBFNN-PID、AWNNPID 各方法的性能指标进行汇总,从而进一步对各 智能控制系统的智能化程度、快速性、稳态误差、抗 干扰、稳定性进行对比分析,为该领域的研究者提 供参考,如表 6 所示。 表 6 中的对比结果显示:1)基于规则推理的智 能控制方法 E-PID 与 EA-PID 具有最好的动态性能 和稳态性能,即响应速度快、稳态误差小;2)基于模 糊推理的智能控制方法 F-PID 与 FA-PID 动态和稳 态性能略差于前者;3)基于神经网络的智能控制方 法 BPNN-PID、RBFNN-PID 与 AWNN-PID 动态和 稳态性能相对最差。 从实际应用便利性和算法智能程度的角度看: 1)基于神经网络优化的智能控制方法,对工程师的 要求最低,即在系统运行前只需要凭经验设置一个 初始参数,或者使用默认初始参数,系统在运行过 程中会实时整定优化,得到最佳的控制参数;2)基 于规则推理的智能控制方法的配置过程则需要工 程师对规则表进行精确的配置,这个过程需要经过 多次系统运行调试验证;3)基于模糊推理的智能控 制方法需要配置隶属度函数的多个配置项,还需要 多次系统运行调试验证,生产实践中需要对工程师 进行培训才可以实施。综上所述,智能系统的智能 程度和性能特征之间存在着此消彼长的辩证关系, 即系统的智能程度提高,往往伴随着性能的降低, 因此智能与性能之间如何取舍是需要进一步研究的 重点。 对两类多种 AI-CC 智能控制方法及系统的性 能与实用性进行总结,如表 7 所示。实验结果表 150 100 50 0 −50 ፱ը/dB 0 2.304 4.608 6.912 Ⱔѹ/(°) 10−3 10−2 10−1 100 101 102 103 䶽⢳/(r·s−1) 10−3 10−2 10−1 100 101 102 103 Gm=−0.156 dB (at 12.1 r/s), Pm=−34.5 deg (at 11.3 r/s) ×104 图 8 控制参数在线整定系统伯德图 Fig. 8 Bode diagram of AI-CC 0 1 2 3 2 1 0 0 1 2 3 0.4 0.2 0 0 1 2 3 1.0 0.5 0 −0.5 0 1 2 3 0.3 0.2 0.1 0 0 1 2 3 1 0 −1 0 1 2 3 10 0 −10 rin, yout kp kd e ki u t/s (a) RBFNN-PID ッ∁ t/s (b) RBFNN-S-PID 算法 5 5 5 1 0 −1 0 2 4 6 1 0 −1 1.0 rin0.5 , yout kp e ki kd u 0 2 4 6 0 2 4 6 0 2 4 6 0 2 4 6 0 2 4 6 图 9 RBFNN-PID 和 RBFNN-S-PID 系统仿真结果对比 Fig. 9 Simulation result of RBFNN-PID and RBFNN-SPID ·830· 智 能 系 统 学 报 第 12 卷