正在加载图片...
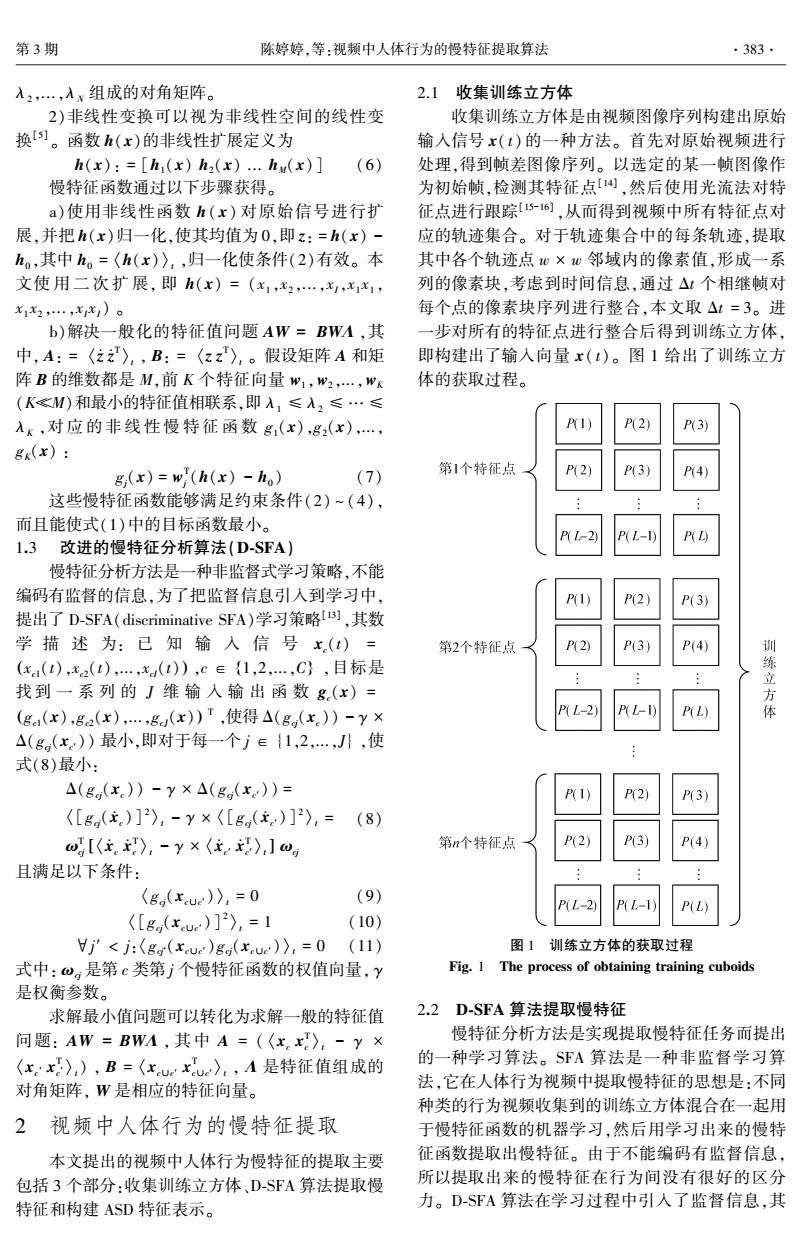
第3期 陈婷婷,等,视频中人体行为的慢特征提取算法 ·383· 入2,,入x组成的对角矩阵。 2.1收集训练立方体 2)非线性变换可以视为非线性空间的线性变 收集训练立方体是由视频图像序列构建出原始 换s。函数h(x)的非线性扩展定义为 输入信号x(t)的一种方法。首先对原始视频进行 h(x):=[h(x)h,(x)..hu(x)] (6) 处理,得到帧差图像序列。以选定的某一帧图像作 慢特征函数通过以下步骤获得。 为初始帧,检测其特征点[4,然后使用光流法对特 a)使用非线性函数h(x)对原始信号进行扩 征点进行跟踪56,从而得到视频中所有特征点对 展,并把h(x)归一化,使其均值为0,即z:=h(x)- 应的轨迹集合。对于轨迹集合中的每条轨迹,提取 h。,其中h。=(h(x)),,归一化使条件(2)有效。本 其中各个轨迹点心×0邻域内的像素值,形成一系 文使用二次扩展,即h(x)=(x1,x2,1,xx1, 列的像素块,考虑到时间信息,通过△1个相继帧对 12…,xx1)。 每个点的像素块序列进行整合,本文取△1=3。进 b)解决一般化的特征值问题AW=BWA,其 一步对所有的特征点进行整合后得到训练立方体, 中,A:=〈乞),,B:=〈zz〉,。假设矩阵A和矩 即构建出了输入向量x(t)。图1给出了训练立方 阵B的维数都是M,前K个特征向量w1,w2,,wx 体的获取过程。 (KM)和最小的特征值相联系,即入1≤入2≤…≤ 入x,对应的非线性慢特征函数g(x),g2(x),, P(1) P2) P3) gx(x): g(x)=w(h(x)-h。) (7) 第1个特征点 P(2) P(3) P4) 这些慢特征函数能够满足约束条件(2)~(4), 而且能使式(1)中的目标函数最小。 PL-2) P(L-1) 1.3改进的慢特征分析算法(D-SFA) 慢特征分析方法是一种非监督式学习策略,不能 编码有监督的信息,为了把监督信息引入到学习中, P(1) P(2 P(3) 提出了D-SFA(discriminative SFA)学习策略],其数 学描述为:已知输人信号x()= 第2个特征点 P2) P(3 (4 (x(t),xa(t),…,x(t),c∈{1,2,…,C},目标是 找到一系列的J维输入输出函数g(x)= 立方体 (g1(x),ga(x)…,g(x)T,使得△(gg(x)-y× P(L-1) P(LY △(g(x))最小,即对于每一个j∈{1,2,…J},使 式(8)最小: △(g(xe))-Y×△(gg(x))= P1) P2) P3) [gg(x)]2),-y×([g(x)]2),=(8) w[x〉,-y×(e)]wg 第n个特征点 P(2) P(3 P(4) 且满足以下条件: 〈gg(xeue)),=0 (9) P(L-2) P(L- P(LY 〈[gg(xue)]2)=1 (10) Vj'<j:(gg(xeve)go(xcve)),=0 (11) 图1训练立方体的获取过程 式中:wg是第c类第j个慢特征函数的权值向量,y Fig.1 The process of obtaining training cuboids 是权衡参数。 求解最小值问题可以转化为求解一般的特征值 2.2D-SFA算法提取慢特征 问题:AW=BWA,其中A=(〈x。x〉,-y× 慢特征分析方法是实现提取慢特征任务而提出 (x:x),),B=〈veXve),A是特征值组成的 的一种学习算法。SFA算法是一种非监督学习算 对角矩阵,W是相应的特征向量。 法,它在人体行为视频中提取慢特征的思想是:不同 种类的行为视频收集到的训练立方体混合在一起用 2视频中人体行为的慢特征提取 于慢特征函数的机器学习,然后用学习出来的慢特 本文提出的视频中人体行为慢特征的提取主要 征函数提取出慢特征。由于不能编码有监督信息, 包括3个部分:收集训练立方体、D-SFA算法提取慢 所以提取出来的慢特征在行为间没有很好的区分 特征和构建ASD特征表示。 力。D-SFA算法在学习过程中引入了监督信息,其λ2 ,...,λ N 组成的对角矩阵。 2)非线性变换可以视为非线性空间的线性变 换[5] 。 函数 h(x)的非线性扩展定义为 h(x): = [h1(x) h2(x) ... hM(x)] (6) 慢特征函数通过以下步骤获得。 a)使用非线性函数 h( x) 对原始信号进行扩 展,并把 h(x)归一化,使其均值为 0,即 z: = h(x) - h0 ,其中 h0 = 〈h(x)〉t ,归一化使条件(2)有效。 本 文使 用 二 次 扩 展, 即 h(x) = (x1 ,x2 ,...,xI,x1 x1 , x1 x2 ,...,xI xI) 。 b)解决一般化的特征值问题 AW = BWΛ ,其 中, A: = 〈z · z ·T 〉t , B: = 〈z z T 〉t 。 假设矩阵 A 和矩 阵 B 的维数都是 M,前 K 个特征向量 w1 ,w2 ,...,wK (K≪M)和最小的特征值相联系,即 λ1 ≤ λ2 ≤ … ≤ λ K ,对 应 的 非 线 性 慢 特 征 函 数 g1(x),g2(x),..., gK(x) : gj(x) = w T j (h(x) - h0 ) (7) 这些慢特征函数能够满足约束条件(2) ~ (4), 而且能使式(1)中的目标函数最小。 1.3 改进的慢特征分析算法(D⁃SFA) 慢特征分析方法是一种非监督式学习策略,不能 编码有监督的信息,为了把监督信息引入到学习中, 提出了 D⁃SFA(discriminative SFA)学习策略[13] ,其数 学 描 述 为: 已 知 输 入 信 号 xc(t) = xc1(t),xc2(t),...,x ( cI(t) ) ,c ∈ {1,2,...,C} ,目标是 找到 一 系 列 的 J 维 输 入 输 出 函 数 gc(x) = (gc1(x),gc2(x),...,gcJ(x) ) T ,使得 Δ(gcj(xc)) - γ × Δ(gcj(xc′)) 最小,即对于每一个 j ∈ {1,2,...,J} ,使 式(8)最小: Δ(gcj(xc)) - γ × Δ(gcj(xc′)) = 〈[gcj(x · c)] 2 〉t - γ × 〈[gcj(x · c′)] 2 〉t = ω T cj 〈x · c x ·T c 〉t - γ × 〈x · c′ x ·T c′〉t [ ] ωcj (8) 且满足以下条件: 〈gcj(xc∪c′)〉t = 0 (9) 〈[gcj(xc∪c′)] 2 〉t = 1 (10) ∀j′ < j:〈gcj′(xc∪c′)gcj(xc∪c′)〉t = 0 (11) 式中: ωcj 是第 c 类第 j 个慢特征函数的权值向量, γ 是权衡参数。 求解最小值问题可以转化为求解一般的特征值 问题: AW = BWΛ , 其 中 A = ( 〈xc x T c 〉t - γ × 〈xc ′ x T c ′〉t) , B = 〈xc∪c′ x T c∪c′〉t , Λ 是特征值组成的 对角矩阵, W 是相应的特征向量。 2 视频中人体行为的慢特征提取 本文提出的视频中人体行为慢特征的提取主要 包括 3 个部分:收集训练立方体、D⁃SFA 算法提取慢 特征和构建 ASD 特征表示。 2.1 收集训练立方体 收集训练立方体是由视频图像序列构建出原始 输入信号 x( t) 的一种方法。 首先对原始视频进行 处理,得到帧差图像序列。 以选定的某一帧图像作 为初始帧,检测其特征点[14] ,然后使用光流法对特 征点进行跟踪[15-16] ,从而得到视频中所有特征点对 应的轨迹集合。 对于轨迹集合中的每条轨迹,提取 其中各个轨迹点 w × w 邻域内的像素值,形成一系 列的像素块,考虑到时间信息,通过 Δt 个相继帧对 每个点的像素块序列进行整合,本文取 Δt = 3。 进 一步对所有的特征点进行整合后得到训练立方体, 即构建出了输入向量 x( t)。 图 1 给出了训练立方 体的获取过程。 图 1 训练立方体的获取过程 Fig. 1 The process of obtaining training cuboids 2.2 D⁃SFA 算法提取慢特征 慢特征分析方法是实现提取慢特征任务而提出 的一种学习算法。 SFA 算法是一种非监督学习算 法,它在人体行为视频中提取慢特征的思想是:不同 种类的行为视频收集到的训练立方体混合在一起用 于慢特征函数的机器学习,然后用学习出来的慢特 征函数提取出慢特征。 由于不能编码有监督信息, 所以提取出来的慢特征在行为间没有很好的区分 力。 D⁃SFA 算法在学习过程中引入了监督信息,其 第 3 期 陈婷婷,等:视频中人体行为的慢特征提取算法 ·383·