正在加载图片...
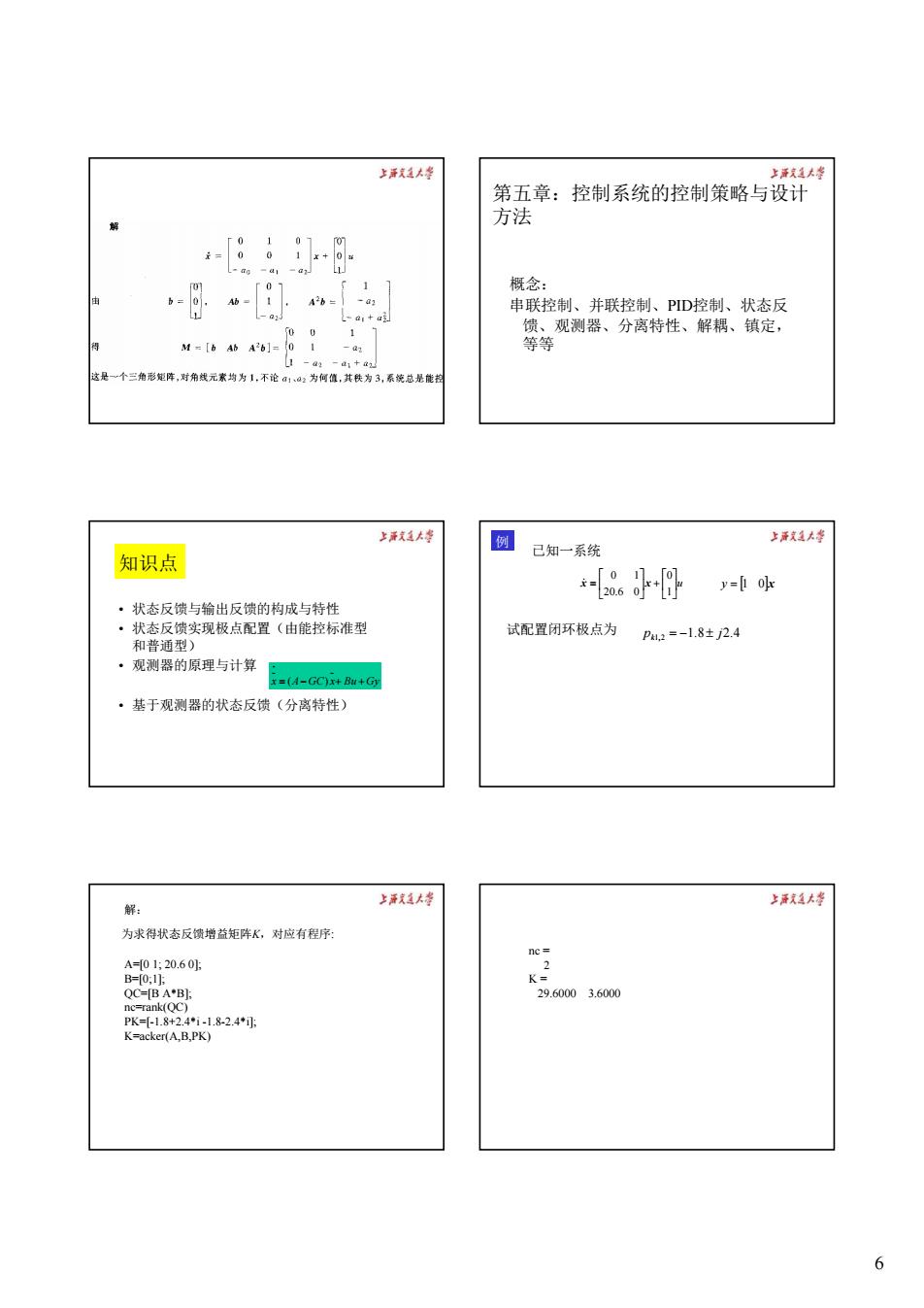
上泽成大坐 上浙克1大当 第五章:控制系统的控制策略与设计 解 方法 07 0 1 x+ / 0 1 概念: Ab A2b=1-a1 串联控制、并联控制、PID控制、状态反 a 0 1 馈、观测器、分离特性、解耦、镇定, 得 M=[b Ab A2b]= 等等 -a2-a1+a2 这是一个三角形矩阵,对角线元素均为1,不论a1、2为何值,其秩为3,系统总是能控 )承文点人岁 例 上活文1大举 知识点 己知一系统 [a小卧 y=1 ok ·状态反馈与输出反馈的构成与特性 ·状态反馈实现极点配置(由能控标准型 试配置闭环极点为 PH,2=-1.8±j2.4 和普通型) ·观测器的原理与计算 x=(A-GC)x+Bu+Gy 基于观测器的状态反馈(分离特性) 上泽元1大孝 解: 上活丝大举 为求得状态反馈增益矩阵K,对应有程序: nc= A=01;20.601: B=0,15 K= QC=[B A*B]: 9.60003.6000 nc=rank(QC) PK=-1.8+2.4i-1.8-2.4*]: K=acker(A,B.PK) 66 第五章:控制系统的控制策略与设计 方法 概念: 串联控制、并联控制、PID控制、状态反 馈、观测器、分离特性、解耦、镇定, 等等 知识点 • 状态反馈与输出反馈的构成与特性 • 状态反馈实现极点配置(由能控标准型 和普通型) • 观测器的原理与计算 • 基于观测器的状态反馈(分离特性) x = A−GC x+ Bu + Gy • ~ ~ ( ) u⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 1 0 20.6 0 0 1 x& x y = [ ] 1 0 x 1.8 2.4 1,2 p j k = − ± 已知一系统 试配置闭环极点为 例 为求得状态反馈增益矩阵K,对应有程序: A=[0 1; 20.6 0]; B=[0;1]; QC=[B A*B]; nc=rank(QC) PK=[-1.8+2.4*i -1.8-2.4*i]; K=acker(A,B,PK) 解: nc = 2 K = 29.6000 3.6000