正在加载图片...
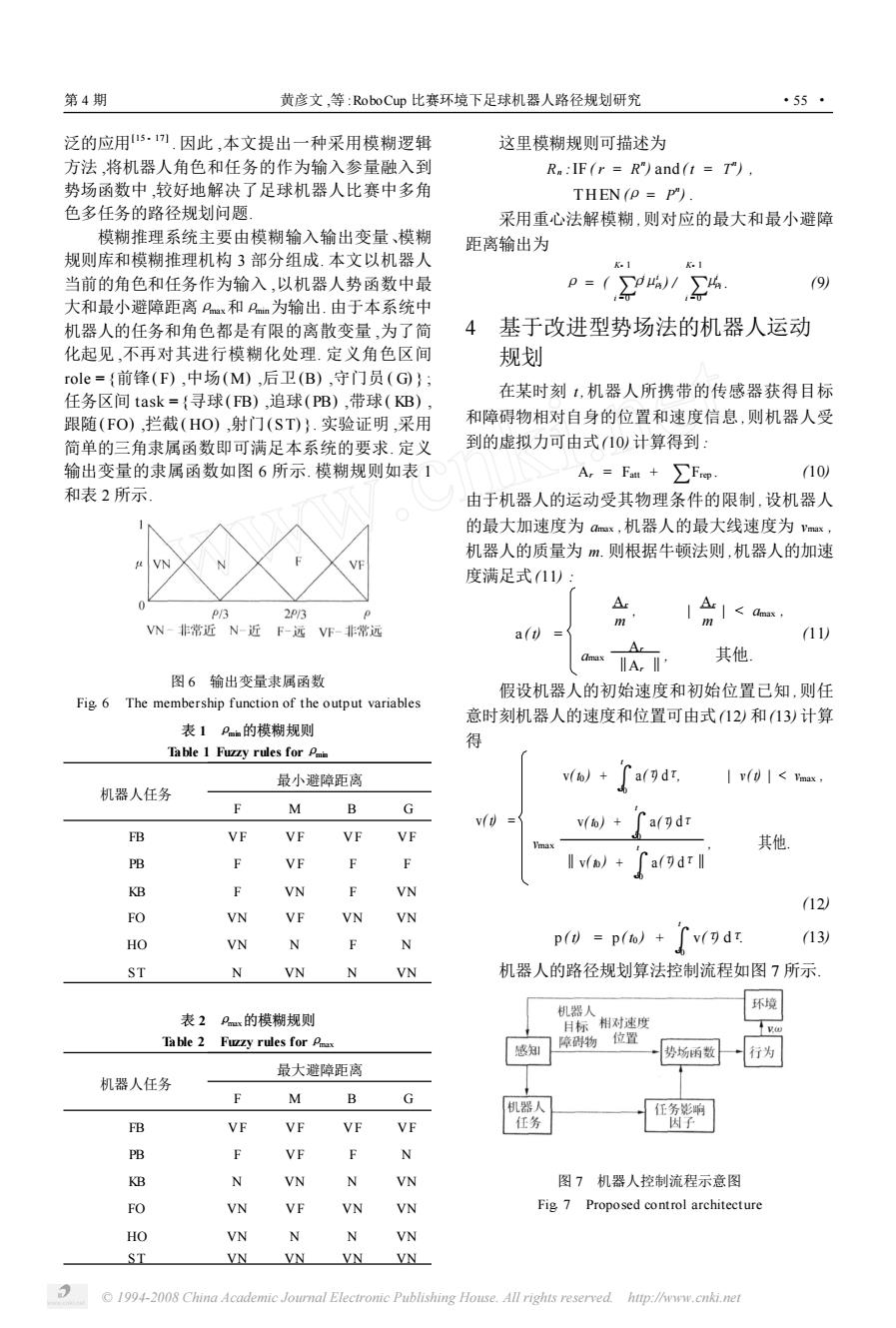
第4期 黄彦文,等:RoboCup比赛环境下足球机器人路径规划研究 ·55 泛的应用51).因此,本文提出一种采用模糊逻辑 这里模糊规则可描述为 方法,将机器人角色和任务的作为输入参量融入到 R:IF(rR")and(tT), 势场函数中,较好地解决了足球机器人比赛中多角 THEN (P=P") 色多任务的路径规划问题 采用重心法解模糊,则对应的最大和最小避障 模糊推理系统主要由模糊输入输出变量、模糊 距离输出为 规则库和模糊推理机构3部分组成.本文以机器人 K.1 当前的角色和任务作为输入,以机器人势函数中最 (9) 大和最小避障距离Ax和Pm为输出.由于本系统中 机器人的任务和角色都是有限的离散变量,为了简 基于改进型势场法的机器人运动 化起见,不再对其进行模糊化处理.定义角色区间 规划 role={前锋(F),中场(M),后卫(B),守门员(G)}; 任务区间task={寻球(FB),追球(PB),带球(KB), 在某时刻1,机器人所携带的传感器获得目标 跟随(FO),拦截(HO),射门(ST)}.实验证明,采用 和障碍物相对自身的位置和速度信息,则机器人受 简单的三角隶属函数即可满足本系统的要求.定义 到的虚拟力可由式10)计算得到: 输出变量的隶属函数如图6所示.模糊规则如表1 A,=Fam+∑Fm 10) 和表2所示 由于机器人的运动受其物理条件的限制,设机器人 的最大加速度为ax,机器人的最大线速度为max, 机器人的质量为m.则根据牛顿法则,机器人的加速 度满足式11): A P/3 2P3 VN-非常近N-近F-远VF-非常远 m m at切 (11) Ar amax lArl' 其他 图6输出变量隶属函数 假设机器人的初始速度和初始位置己知,则任 Fig 6 The membership function of the output variables 意时刻机器人的速度和位置可由式(12)和13)计算 表1P的模糊规则 得 Table 1 Fuzzy rules for Am 最小避障距离 v(o)+ a(n dr. v<Vmax, 机器人任务 F G v(D) v(to)+ a(dr FB VE VE VF VF ma 其他 PB F VF & II v)+ alydr E VN F VN (12) FO VN VF VN VN HO VN N F N p()=p(o)+ v(ydr (13) ST N VN N VN 机器人的路径规划算法控制流程如图7所示. 机器人 环境 表2Pm的模糊规则 月标相对速度 Table 2 Furzy rules for Ax 感知 障碍物位置 势场函数 行为 最大避障距离 机器人任务 F M B G 机器人 FB VF VF VF VF 任务 PB F VF F N KB N VN N VN 图7机器人控制流程示意图 FO VN VF VN VN Fig 7 Proposed control architecture HO VN N VN ST VN VN VN VN 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved hup://www.cnki.net泛的应用[15 - 17 ] . 因此 ,本文提出一种采用模糊逻辑 方法 ,将机器人角色和任务的作为输入参量融入到 势场函数中 ,较好地解决了足球机器人比赛中多角 色多任务的路径规划问题. 模糊推理系统主要由模糊输入输出变量、模糊 规则库和模糊推理机构 3 部分组成. 本文以机器人 当前的角色和任务作为输入 ,以机器人势函数中最 大和最小避障距离ρmax和ρmin为输出. 由于本系统中 机器人的任务和角色都是有限的离散变量 ,为了简 化起见 ,不再对其进行模糊化处理. 定义角色区间 role = {前锋(F) ,中场(M) ,后卫(B) ,守门员 ( G) } ; 任务区间 task = {寻球(FB) ,追球(PB) ,带球( KB) , 跟随(FO) ,拦截( HO) ,射门(ST) }. 实验证明 ,采用 简单的三角隶属函数即可满足本系统的要求. 定义 输出变量的隶属函数如图 6 所示. 模糊规则如表 1 和表 2 所示. 图 6 输出变量隶属函数 Fig16 The membership function of the output variables 表 1 ρmin的模糊规则 Table 1 Fuzzy rules forρmin 机器人任务 最小避障距离 F M B G FB VF VF VF VF PB F VF F F KB F VN F VN FO VN VF VN VN HO VN N F N ST N VN N VN 表 2 ρmax的模糊规则 Table 2 Fuzzy rules forρmax 机器人任务 最大避障距离 F M B G FB VF VF VF VF PB F VF F N KB N VN N VN FO VN VF VN VN HO VN N N VN ST VN VN VN VN 这里模糊规则可描述为 Rn :IF( r = R n ) and ( t = T n ) , T HEN (ρ = P n ) . 采用重心法解模糊 ,则对应的最大和最小避障 距离输出为 ρ = ( ∑ K- 1 i =0 ρμi i ρi) / ∑ K- 1 i = 0 μi ρi . (9) 4 基于改进型势场法的机器人运动 规划 在某时刻 t ,机器人所携带的传感器获得目标 和障碍物相对自身的位置和速度信息 ,则机器人受 到的虚拟力可由式(10) 计算得到 : Ar = Fatt + ∑Frep . (10) 由于机器人的运动受其物理条件的限制 ,设机器人 的最大加速度为 amax ,机器人的最大线速度为 vmax , 机器人的质量为 m. 则根据牛顿法则 ,机器人的加速 度满足式(11) : a ( t) = Ar m , | Ar m | < amax , amax Ar ‖Ar ‖ , 其他. (11) 假设机器人的初始速度和初始位置已知 ,则任 意时刻机器人的速度和位置可由式(12) 和(13) 计算 得 v( t) = v( t0 ) +∫ t t 0 a(τ) dτ, | v( t) | < vmax , vmax v( t0 ) +∫ t t 0 a(τ) dτ ‖v( t0 ) +∫ t t 0 a (τ) dτ‖ , 其他. (12) p ( t) = p ( t0 ) +∫ t t 0 v(τ) dτ. (13) 机器人的路径规划算法控制流程如图 7 所示. 图 7 机器人控制流程示意图 Fig17 Proposed control architecture 第 4 期 黄彦文 ,等 :RoboCup 比赛环境下足球机器人路径规划研究 · 55 · © 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net