正在加载图片...
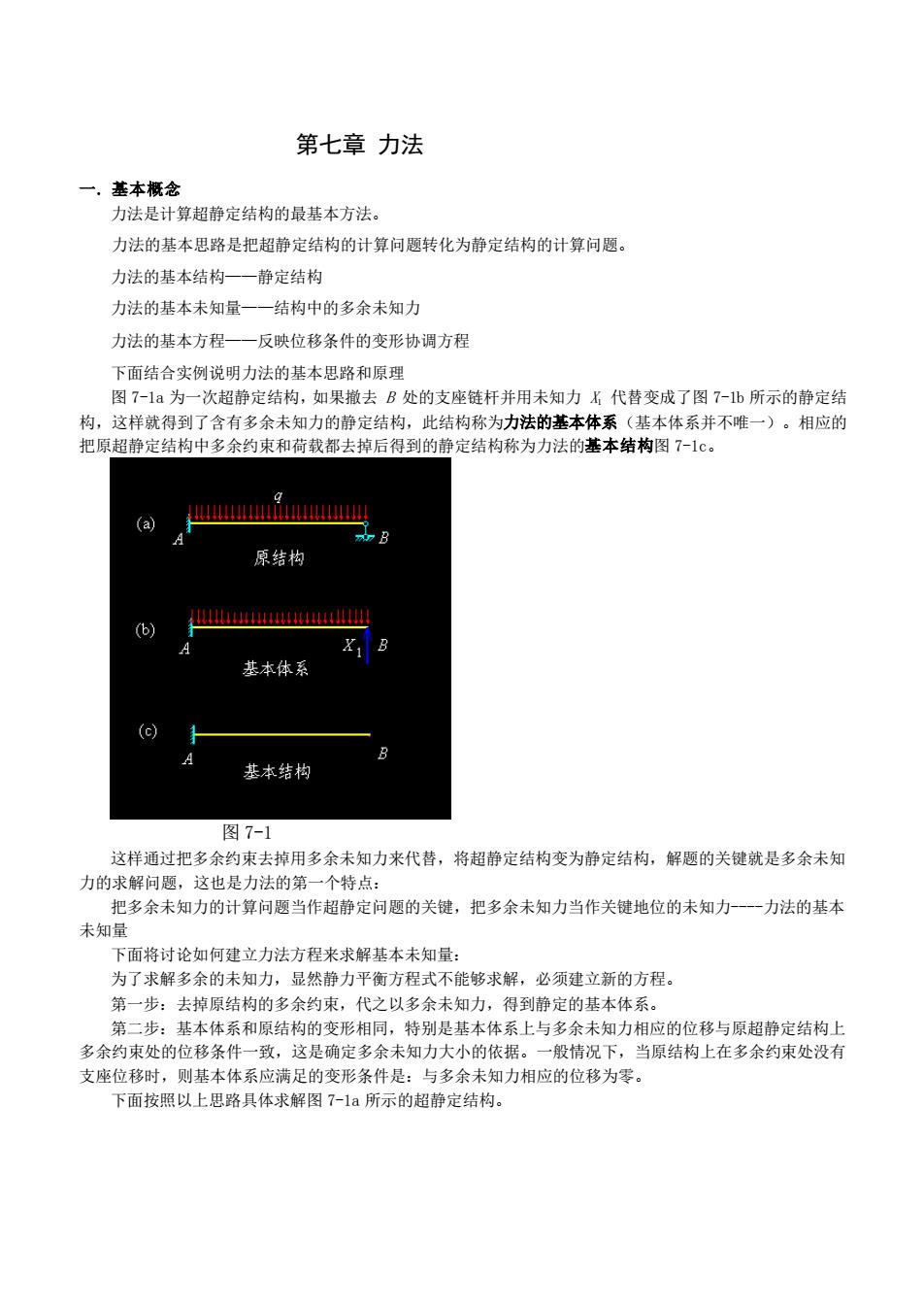
第七章力法 一.基本概念 力法是计算超静定结构的最基本方法。 力法的基本思路是把超静定结构的计算问题转化为静定结构的计算问题。 力法的基本结构一一静定结构 力法的基本未知量一一结构中的多余未知力 力法的基本方程一一反映位移条件的变形协调方程 下面结合实例说明力法的基本思路和原理 图7-1为一次超静定结构,如果撒去B处的支座链杆并用未知力,代替变成了图7-1b所示的静定结 构,这样就得到了含有多余未知力的静定结构,此结构称为力法的基本体系(基本体系并不唯一)。相应的 把原超静定结构中多余约束和荷载都去掉后得到的静定结构称为力法的基本结构图7-1©。 9山通送 原结构 () 出 y X B 基本体系 基本结构 图7-1 这样通过把多余约束去掉用多余未知力来代替,将超静定结构变为静定结构,解题的关键就是多余未知 力的求解问题, 这也是力法的第一个特点 把多余未知力的计算问题当作超静定问题的关健,把多余未知力当作关健地位的未知力 —一力法的基本 未知量 下面将讨论如何建立力法方程来求解基本未知量: 为了求解多余的未知力,显然静力平衡方程式不能够求解,必须建立新的方程。 第一步:去掉原结构的多余约束,代之以多余未知力,得到静定的基本体系。 第二步:基 体系 原结构的变形相同,特别是基 系上与多余未知力相应的位移与原超静定结构 多余约束处的位移条件一致,这是确定多余未知力大小的依据。一般情况下,当原结构上在多余约束处没有 支座位移时,则基本体系应满足的变形条件是:与多余未知力相应的位移为零。 下面按照以上思路具体求解图T-1所示的超静定结构。 第七章 力法 一. 基本概念 力法是计算超静定结构的最基本方法。 力法的基本思路是把超静定结构的计算问题转化为静定结构的计算问题。 力法的基本结构——静定结构 力法的基本未知量——结构中的多余未知力 力法的基本方程——反映位移条件的变形协调方程 下面结合实例说明力法的基本思路和原理 图 7-1a 为一次超静定结构,如果撤去 B 处的支座链杆并用未知力 X1 代替变成了图 7-1b 所示的静定结 构,这样就得到了含有多余未知力的静定结构,此结构称为力法的基本体系(基本体系并不唯一)。相应的 把原超静定结构中多余约束和荷载都去掉后得到的静定结构称为力法的基本结构图 7-1c。 图 7-1 这样通过把多余约束去掉用多余未知力来代替,将超静定结构变为静定结构,解题的关键就是多余未知 力的求解问题,这也是力法的第一个特点: 把多余未知力的计算问题当作超静定问题的关键,把多余未知力当作关键地位的未知力-力法的基本 未知量 下面将讨论如何建立力法方程来求解基本未知量: 为了求解多余的未知力,显然静力平衡方程式不能够求解,必须建立新的方程。 第一步:去掉原结构的多余约束,代之以多余未知力,得到静定的基本体系。 第二步:基本体系和原结构的变形相同,特别是基本体系上与多余未知力相应的位移与原超静定结构上 多余约束处的位移条件一致,这是确定多余未知力大小的依据。一般情况下,当原结构上在多余约束处没有 支座位移时,则基本体系应满足的变形条件是:与多余未知力相应的位移为零。 下面按照以上思路具体求解图 7-1a 所示的超静定结构