正在加载图片...
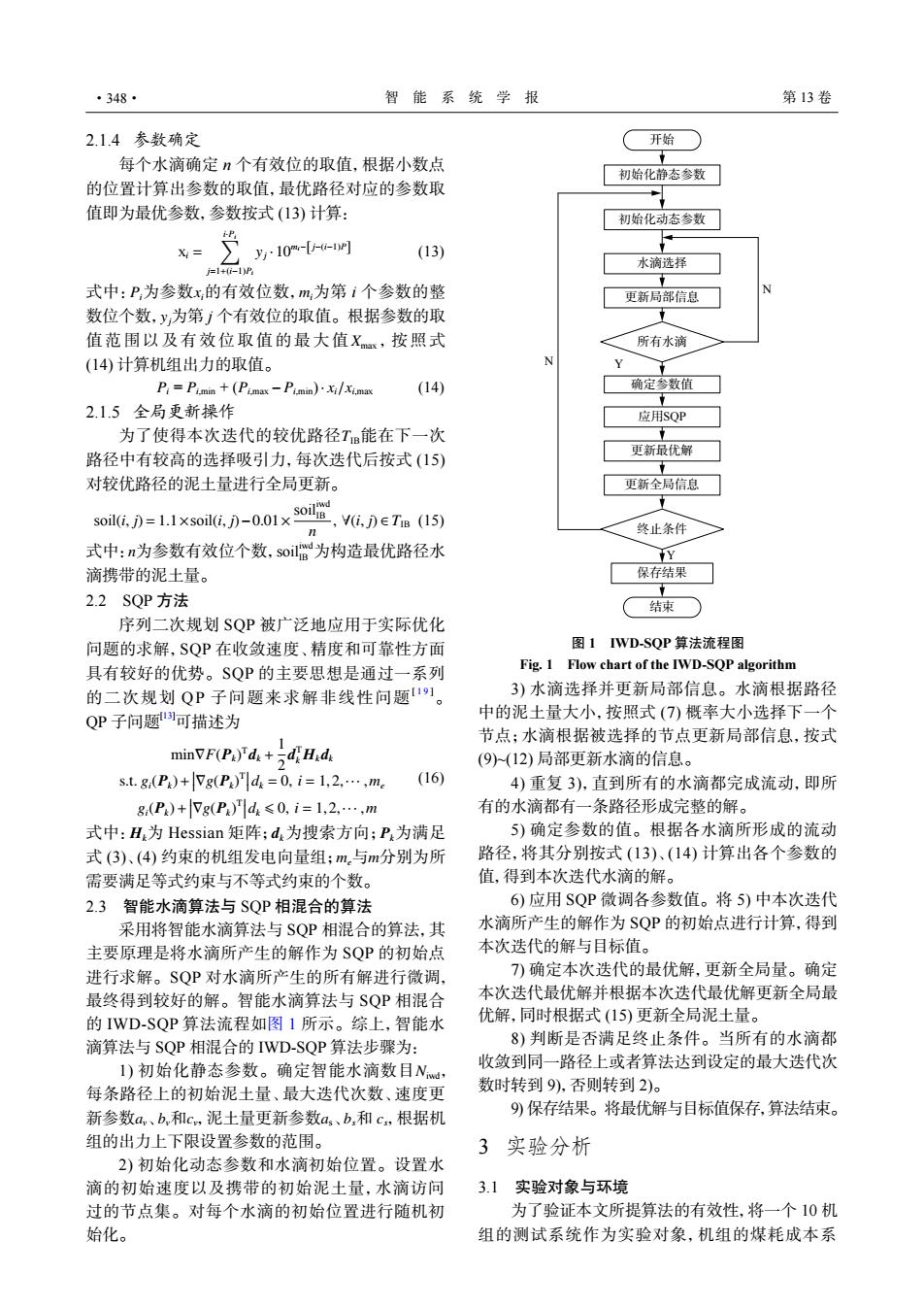
·348· 智能系统学报 第13卷 2.1.4参数确定 开始 每个水滴确定n个有效位的取值,根据小数点 初始化静态参数 的位置计算出参数的取值,最优路径对应的参数取 值即为最优参数,参数按式(13)计算: 初始化动态参数 Xi= y10- (13) j=1+i-1B 水滴选择 式中:P,为参数x的有效位数,m为第i个参数的整 更新局部信息 数位个数,y为第j个有效位的取值。根据参数的取 值范围以及有效位取值的最大值Xx,按照式 所有水滴 (14)计算机组出力的取值。 Y P:=Pimin+(Pimax-Pimin)·x/Xi.max (14) 确定参数值 2.1.5全局更新操作 应用SQP 为了使得本次迭代的较优路径Ts能在下一次 路径中有较高的选择吸引力,每次迭代后按式(15) 更新最优解 对较优路径的泥土量进行全局更新。 更新全局信息 si()=1.xs (15) n 终止条件 式中:n为参数有效位个数,soi为构造最优路径水 Y 滴携带的泥土量。 保存结果 2.2SQP方法 结束 序列二次规划SQP被广泛地应用于实际优化 问题的求解,SQP在收敛速度、精度和可靠性方面 图1IWD-SQP算法流程图 具有较好的优势。SQP的主要思想是通过一系列 Fig.1 Flow chart of the IWD-SQP algorithm 的二次规划QP子问题来求解非线性问题]。 3)水滴选择并更新局部信息。水滴根据路径 QP子问题可描述为 中的泥土量大小,按照式(7)概率大小选择下一个 节点;水滴根据被选择的节点更新局部信息,按式 minVF(P)rd+与dHkd (9)(12)局部更新水滴的信息。 s.t.g(P)+Vg(P d =0.i=1.2.....m (16) 4)重复3),直到所有的水滴都完成流动,即所 g:(P)+g(P)d≤0,i=1,2,…,m 有的水滴都有一条路径形成完整的解。 式中:H为Hessian矩阵;d为搜索方向;P为满足 5)确定参数的值。根据各水滴所形成的流动 式(3)、(4)约束的机组发电向量组;m与m分别为所 路径,将其分别按式(13)、(14)计算出各个参数的 需要满足等式约束与不等式约束的个数。 值,得到本次迭代水滴的解。 2.3智能水滴算法与SQP相混合的算法 6)应用SQP微调各参数值。将5)中本次迭代 采用将智能水滴算法与SQP相混合的算法,其 水滴所产生的解作为SQP的初始点进行计算,得到 主要原理是将水滴所产生的解作为SQP的初始点 本次迭代的解与目标值。 进行求解。SQP对水滴所产生的所有解进行微调, 7)确定本次迭代的最优解,更新全局量。确定 最终得到较好的解。智能水滴算法与SQP相混合 本次迭代最优解并根据本次迭代最优解更新全局最 的WD-SQP算法流程如图1所示。综上,智能水 优解,同时根据式(15)更新全局泥土量。 滴算法与SQP相混合的IWD-SQP算法步骤为: 8)判断是否满足终止条件。当所有的水滴都 1)初始化静态参数。确定智能水滴数目Nd, 收敛到同一路径上或者算法达到设定的最大迭代次 每条路径上的初始泥土量、最大迭代次数、速度更 数时转到9),否则转到2)。 新参数a、b,和c,泥土量更新参数a、b和c,根据机 9)保存结果。将最优解与目标值保存,算法结束。 组的出力上下限设置参数的范围。 3实验分析 2)初始化动态参数和水滴初始位置。设置水 滴的初始速度以及携带的初始泥土量,水滴访问 31实验对象与环境 过的节点集。对每个水滴的初始位置进行随机初 为了验证本文所提算法的有效性,将一个10机 始化。 组的测试系统作为实验对象,机组的煤耗成本系2.1.4 参数确定 每个水滴确定 n 个有效位的取值,根据小数点 的位置计算出参数的取值,最优路径对应的参数取 值即为最优参数,参数按式 (13) 计算: xi = ∑i·Pi j=1+(i−1)Pi yj · 10mi−[j−(i−1)P] (13) Pi xi mi yj Xmax 式中: 为参数 的有效位数, 为第 i 个参数的整 数位个数, 为第 j 个有效位的取值。根据参数的取 值范围以及有效位取值的最大值 ,按照式 (14) 计算机组出力的取值。 Pi = Pi,min + (Pi,max − Pi,min)· xi/xi,max (14) 2.1.5 全局更新操作 为了使得本次迭代的较优路径 TIB能在下一次 路径中有较高的选择吸引力,每次迭代后按式 (15) 对较优路径的泥土量进行全局更新。 soil(i, j) = 1.1×soil(i, j)−0.01× soiliwd IB n , ∀(i, j) ∈ TIB (15) n soiliwd 式中: 为参数有效位个数, IB 为构造最优路径水 滴携带的泥土量。 2.2 SQP 方法 序列二次规划 SQP 被广泛地应用于实际优化 问题的求解,SQP 在收敛速度、精度和可靠性方面 具有较好的优势。SQP 的主要思想是通过一系列 的二次规划 QP 子问题来求解非线性问题[ 1 9 ]。 QP 子问题[13]可描述为 min∇F(Pk) T dk + 1 2 d T k Hkdk s.t. gi(Pk)+
∇g(Pk) T
dk = 0, i = 1,2,··· ,me gi(Pk)+
∇g(Pk) T
dk ⩽ 0, i = 1,2,··· ,m (16) Hk dk Pk me m 式中: 为 Hessian 矩阵; 为搜索方向; 为满足 式 (3)、(4) 约束的机组发电向量组; 与 分别为所 需要满足等式约束与不等式约束的个数。 2.3 智能水滴算法与 SQP 相混合的算法 采用将智能水滴算法与 SQP 相混合的算法,其 主要原理是将水滴所产生的解作为 SQP 的初始点 进行求解。SQP 对水滴所产生的所有解进行微调, 最终得到较好的解。智能水滴算法与 SQP 相混合 的 IWD-SQP 算法流程如图 1 所示。综上,智能水 滴算法与 SQP 相混合的 IWD-SQP 算法步骤为: Niwd av bv cv as bs cs 1) 初始化静态参数。确定智能水滴数目 , 每条路径上的初始泥土量、最大迭代次数、速度更 新参数 、 和 ,泥土量更新参数 、 和 ,根据机 组的出力上下限设置参数的范围。 2) 初始化动态参数和水滴初始位置。设置水 滴的初始速度以及携带的初始泥土量,水滴访问 过的节点集。对每个水滴的初始位置进行随机初 始化。 3) 水滴选择并更新局部信息。水滴根据路径 中的泥土量大小,按照式 (7) 概率大小选择下一个 节点;水滴根据被选择的节点更新局部信息,按式 (9)~(12) 局部更新水滴的信息。 4) 重复 3),直到所有的水滴都完成流动,即所 有的水滴都有一条路径形成完整的解。 5) 确定参数的值。根据各水滴所形成的流动 路径,将其分别按式 (13)、(14) 计算出各个参数的 值,得到本次迭代水滴的解。 6) 应用 SQP 微调各参数值。将 5) 中本次迭代 水滴所产生的解作为 SQP 的初始点进行计算,得到 本次迭代的解与目标值。 7) 确定本次迭代的最优解,更新全局量。确定 本次迭代最优解并根据本次迭代最优解更新全局最 优解,同时根据式 (15) 更新全局泥土量。 8) 判断是否满足终止条件。当所有的水滴都 收敛到同一路径上或者算法达到设定的最大迭代次 数时转到 9),否则转到 2)。 9) 保存结果。将最优解与目标值保存,算法结束。 3 实验分析 3.1 实验对象与环境 为了验证本文所提算法的有效性,将一个 10 机 组的测试系统作为实验对象,机组的煤耗成本系 初始化静态参数 初始化动态参数 水滴选择 更新局部信息 所有水滴 确定参数值 更新全局信息 更新最优解 保存结果 结束 N 开始 应用SQP 终止条件 Y Y N 图 1 IWD-SQP 算法流程图 Fig. 1 Flow chart of the IWD-SQP algorithm ·348· 智 能 系 统 学 报 第 13 卷