正在加载图片...
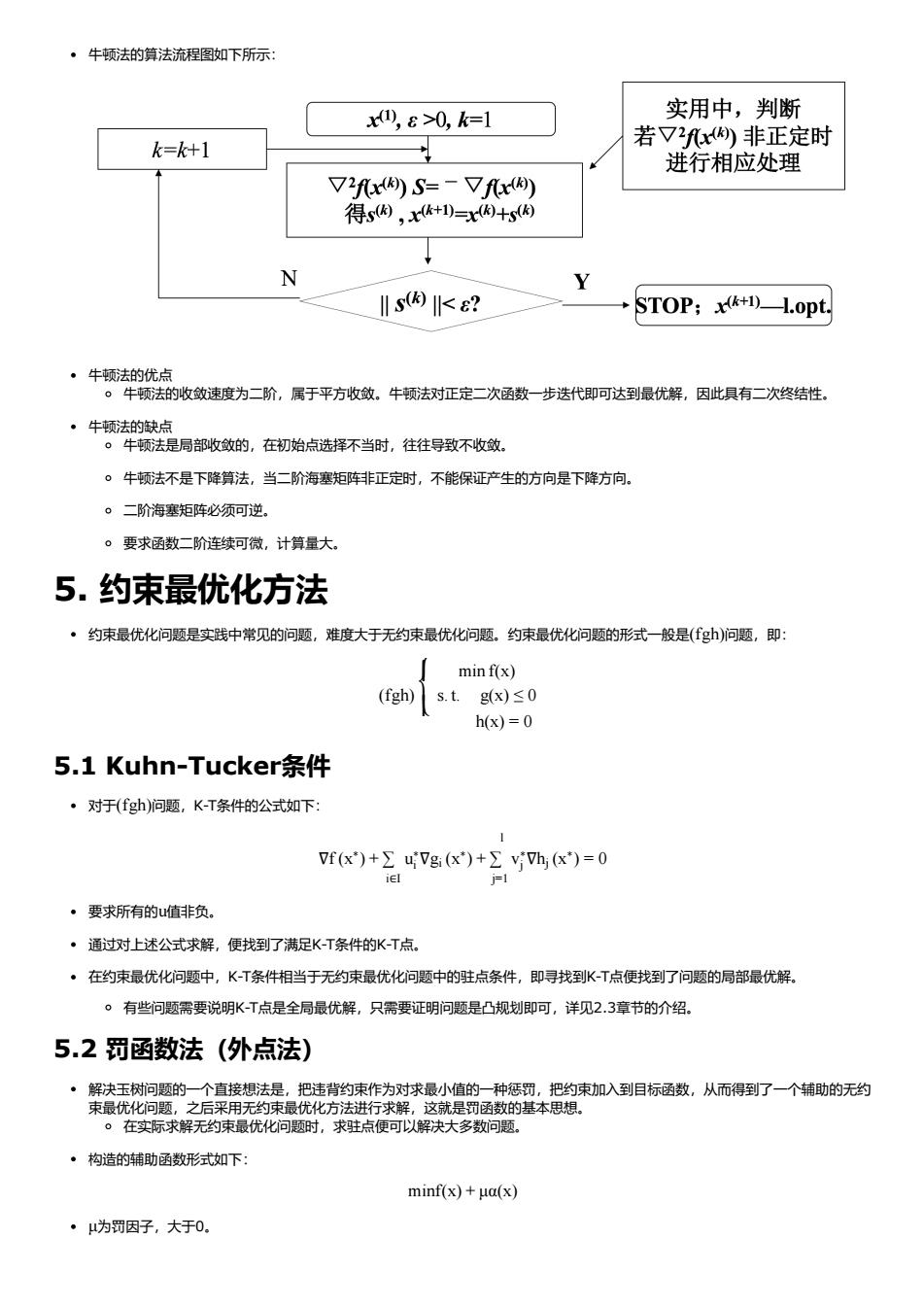
·牛顿法的慎法流程图如下所示: x,0,k=1 实用中,判断 k=k+1 若72f例非正定时 进行相应处理 (k))S=-vfx(h) 得s因,xk+)=x)+s因 N Is网IKe2 STOP:x)-L.opt. ·牛本的收效速宝为二价。于平方改效。牛锈法对正定二次通数步这代即可达到最优器,因此具有二次终结生 。牛顿法的缺点 。牛顿法是局部收敛的,在初始点选择不当时,往往导致不收敛。 。牛顿法不是下降算法,当二阶海塞矩阵非正定时,不能保证产生的方向是下降方向。 。二阶海塞矩阵必须可逆。 。要求函数二阶连续可微,计算量大, 5.约束最优化方法 ·约束最优化问题是实践中常见的问题,难度大于无约束最优化问题.约束最优化问题的形式一般是(fgh)问题,即: I minf(x) (fgh)s.tgx)≤0 h(x)=0 5.1Kuhn-Tucker条件 ·对于(gh)问题,K-T条件的公式如下: +名e+y7%们-0 e1 ·要求所有的u值非负。 ·通过对上述公式求解,便找到了满足K-T条件的K-T点 ·在约束最优化问题中,K-T条件相当于无约束最优化问题中的驻点条件,即寻找到KT点便找到了问题的局部最优解, 。有些问题需要说明K-T点是全局最优解,只需要证明问题是凸规划即可,详见2.3京节的介绍 5.2罚函数法(外点法) ·解决玉树问题的一个直接想法是,把违背约束作为对求最小值的一种惩罚,把约束加入到目标函数,从而得到了一个辅助的无约 型本不思想 ·构造的辅助函数形式如下: minf(x)+μa(x) ·为罚因子,大于0, 牛顿法的算法流程图如下所示: 牛顿法的优点 牛顿法的收敛速度为二阶,属于平方收敛。牛顿法对正定二次函数一步迭代即可达到最优解,因此具有二次终结性。 牛顿法的缺点 牛顿法是局部收敛的,在初始点选择不当时,往往导致不收敛。 牛顿法不是下降算法,当二阶海塞矩阵非正定时,不能保证产生的方向是下降方向。 二阶海塞矩阵必须可逆。 要求函数二阶连续可微,计算量大。 5. 约束最优化方法 约束最优化问题是实践中常见的问题,难度大于无约束最优化问题。约束最优化问题的形式一般是 问题,即: 5.1 Kuhn-Tucker条件 对于 问题,K-T条件的公式如下: 要求所有的 值非负。 通过对上述公式求解,便找到了满足K-T条件的K-T点。 在约束最优化问题中,K-T条件相当于无约束最优化问题中的驻点条件,即寻找到K-T点便找到了问题的局部最优解。 有些问题需要说明K-T点是全局最优解,只需要证明问题是凸规划即可,详见2.3章节的介绍。 5.2 罚函数法(外点法) 解决玉树问题的一个直接想法是,把违背约束作为对求最小值的一种惩罚,把约束加入到目标函数,从而得到了一个辅助的无约 束最优化问题,之后采用无约束最优化方法进行求解,这就是罚函数的基本思想。 在实际求解无约束最优化问题时,求驻点便可以解决大多数问题。 构造的辅助函数形式如下: 为罚因子,大于0。 (fgh) (fgh) ⎧⎪ ⎨ ⎪⎩ min f(x) s. t. g(x) ≤ 0 h(x) = 0 (fgh) ∇f (x ∗ ) + ∑ i∈I u ∗ i ∇gi (x ∗ ) + l ∑ j=1 v ∗ j ∇hj (x ∗ ) = 0 u minf(x) + μα(x) μ