正在加载图片...
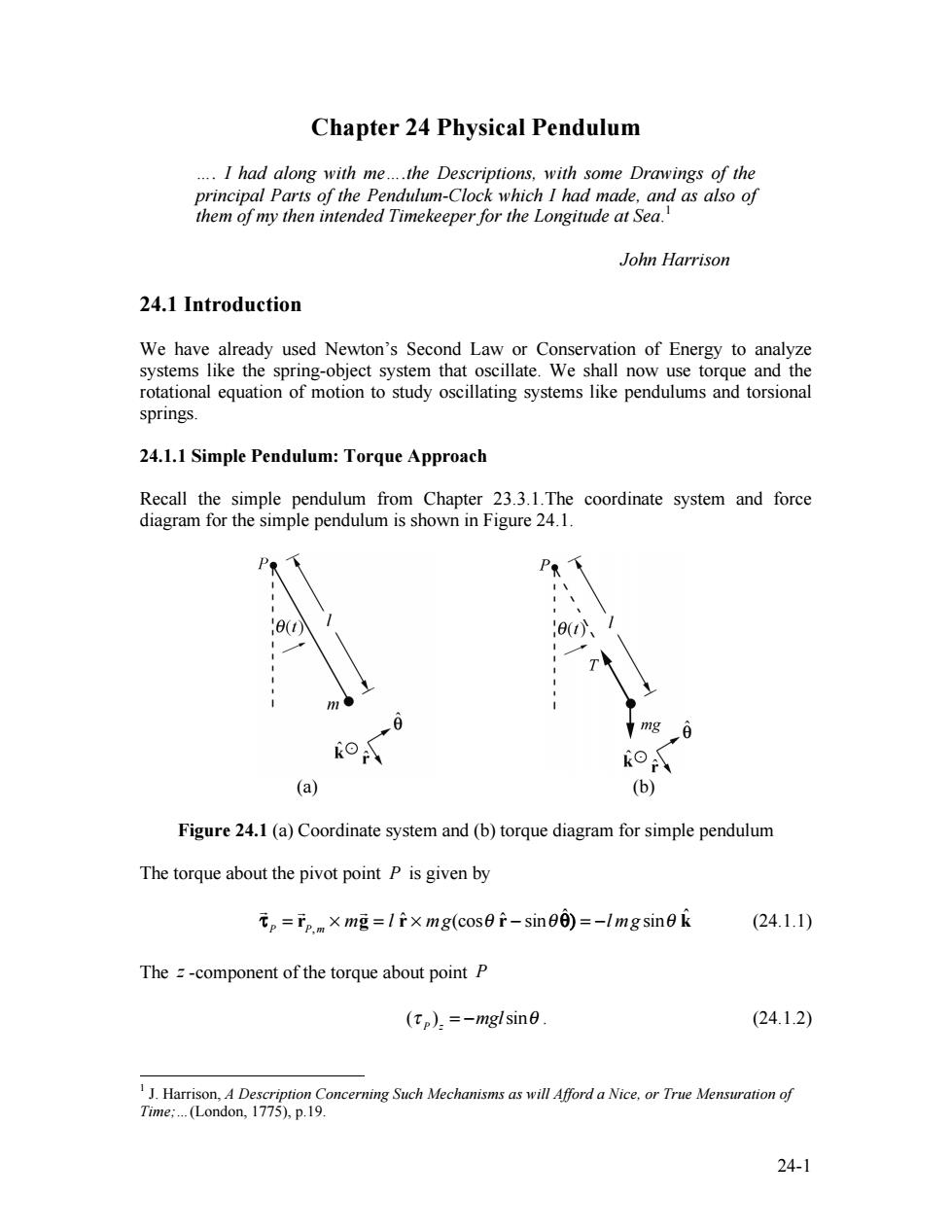
Chapter 24 Physical Pendulum ...I had along with me....the Descriptions,with some Drawings of the principal Parts of the Pendulum-Clock which I had made,and as also of them of my then intended Timekeeper for the Longitude at Sea. John Harrison 24.1 Introduction We have already used Newton's Second Law or Conservation of Energy to analyze systems like the spring-object system that oscillate.We shall now use torque and the rotational equation of motion to study oscillating systems like pendulums and torsional springs 24.1.1 Simple Pendulum:Torque Approach Recall the simple pendulum from Chapter 23.3.1.The coordinate system and force diagram for the simple pendulum is shown in Figure 24.1. PR (t 0t)、 mg (a) (b) Figure 24.1 (a)Coordinate system and (b)torque diagram for simple pendulum The torque about the pivot point P is given by 元p=ipm×mg=1f×mg(cos8f-sine)=-Imgsin0k (24.1.1) The z-component of the torque about point P (p).=-mglsin0. (24.1.2) J.Harrison,A Description Concerning Such Mechanisms as will Afford a Nice,or True Mensuration of Time;...(London,1775),p.19. 24-124-1 Chapter 24 Physical Pendulum …. I had along with me….the Descriptions, with some Drawings of the principal Parts of the Pendulum-Clock which I had made, and as also of them of my then intended Timekeeper for the Longitude at Sea. 1 John Harrison 24.1 Introduction We have already used Newton’s Second Law or Conservation of Energy to analyze systems like the spring-object system that oscillate. We shall now use torque and the rotational equation of motion to study oscillating systems like pendulums and torsional springs. 24.1.1 Simple Pendulum: Torque Approach Recall the simple pendulum from Chapter 23.3.1.The coordinate system and force diagram for the simple pendulum is shown in Figure 24.1. (a) (b) Figure 24.1 (a) Coordinate system and (b) torque diagram for simple pendulum The torque about the pivot point P is given by τ P = rP, m × m g = l rˆ × mg(cosθ rˆ − sinθ ˆ θ) = −l mg sinθ kˆ (24.1.1) The z -component of the torque about point P (τ P )z = −mglsinθ . (24.1.2) 1 J. Harrison, A Description Concerning Such Mechanisms as will Afford a Nice, or True Mensuration of Time;…(London, 1775), p.19