正在加载图片...
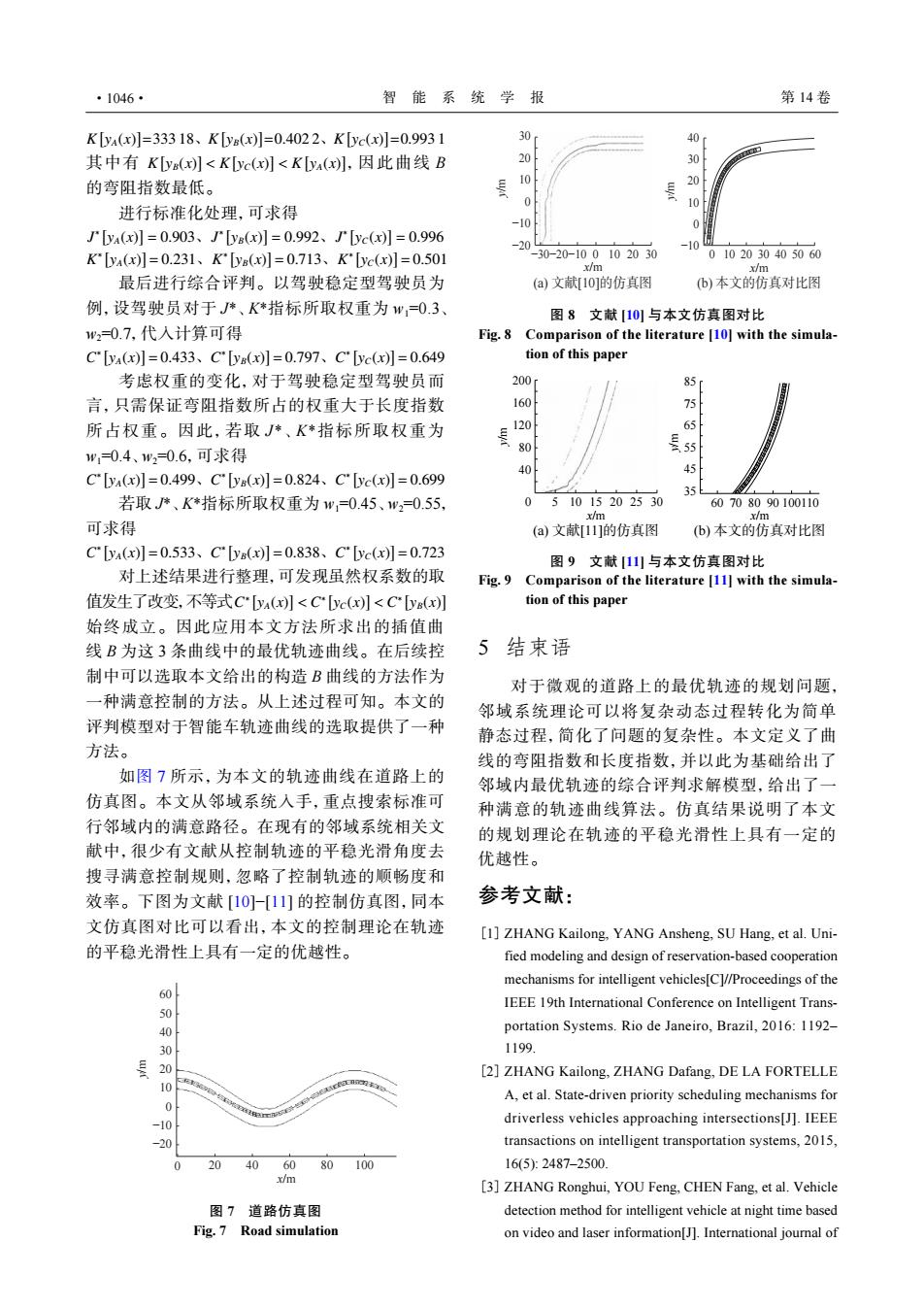
·1046· 智能系统学报 第14卷 Kya(x]=33318、Kys(x]=0.4022、Kyc(x]=0.9931 30 40 其中有Kys(<KyC(x]<K[yA(,因此曲线B 30 的弯阻指数最低。 20 0 进行标准化处理,可求得 -10 0 J厂bya(x]=0.903、Jbys(x]=0.992、[yc(x]=0.996 -20 -10 Kya(x]=0.231、K'ys(x=0.713、Kbyc(x=0.501 30-20-100102030 0102030405060 x/m x/m 最后进行综合评判。以驾驶稳定型驾驶员为 (a)文献10的仿真图 b)本文的仿真对比图 例,设驾驶员对于J*、K*指标所取权重为w=0.3、 图8文献[10]与本文仿真图对比 2=0.7,代入计算可得 Fig.8 Comparison of the literature [10]with the simula- C[bya(x=0.433、Cbys(xj=0.797、Cbyc(x=0.649 tion of this paper 考虑权重的变化,对于驾驶稳定型驾驶员而 200 85 言,只需保证弯阻指数所占的权重大于长度指数 160 所占权重。因此,若取J*、K*指标所取权重为 120 w,=0.4、w2=0.6,可求得 55 o 5 Cya(x]=0.499、Cys(xj=0.824、Cyc(x=0.699 35 若取J*、K*指标所取权重为w,=0.45、1w2=0.55, 051015202530 60708090100110 x/m x/m 可求得 (a)文献[11]的仿真图 (b)本文的仿真对比图 C[yax=0.533、C[bys(x=0.838、Cbyc(x]=0.723 图9文献[11】与本文仿真图对比 对上述结果进行整理,可发现虽然权系数的取 Fig.9 Comparison of the literature [11]with the simula- 值发生了改变,不等式Cbya(<Cc(x<Cys(x] tion of this paper 始终成立。因此应用本文方法所求出的插值曲 线B为这3条曲线中的最优轨迹曲线。在后续控 5结束语 制中可以选取本文给出的构造B曲线的方法作为 对于微观的道路上的最优轨迹的规划问题, 一种满意控制的方法。从上述过程可知。本文的 邻域系统理论可以将复杂动态过程转化为简单 评判模型对于智能车轨迹曲线的选取提供了一种 静态过程,简化了问题的复杂性。本文定义了曲 方法。 线的弯阻指数和长度指数,并以此为基础给出了 如图7所示,为本文的轨迹曲线在道路上的 邻域内最优轨迹的综合评判求解模型,给出了一 仿真图。本文从邻域系统入手,重点搜索标准可 种满意的轨迹曲线算法。仿真结果说明了本文 行邻域内的满意路径。在现有的邻域系统相关文 的规划理论在轨迹的平稳光滑性上具有一定的 献中,很少有文献从控制轨迹的平稳光滑角度去 优越性。 搜寻满意控制规则,忽略了控制轨迹的顺畅度和 效率。下图为文献[10]-[11]的控制仿真图,同本 参考文献: 文仿真图对比可以看出,本文的控制理论在轨迹 [1]ZHANG Kailong,YANG Ansheng,SU Hang,et al.Uni- 的平稳光滑性上具有一定的优越性。 fied modeling and design of reservation-based cooperation mechanisms for intelligent vehicles[C]//Proceedings of the 60 IEEE 19th International Conference on Intelligent Trans- 50 40 portation Systems.Rio de Janeiro,Brazil,2016:1192- 30 1199 复20 [2]ZHANG Kailong,ZHANG Dafang,DE LA FORTELLE 0 A,et al.State-driven priority scheduling mechanisms for -10 driverless vehicles approaching intersections[J].IEEE -20 transactions on intelligent transportation systems,2015, 0 20406080 100 16(5):2487-2500 x/m [3]ZHANG Ronghui,YOU Feng,CHEN Fang,et al.Vehicle 图7道路仿真图 detection method for intelligent vehicle at night time based Fig.7 Road simulation on video and laser information[J].International journal ofK [ yA(x) ] =333 18、K [ yB(x) ] =0.402 2、K [ yC(x) ] =0.993 1 K [ yB(x) ] < K [ yC(x) ] < K [ yA(x) ] 其中有 ,因此曲线 B 的弯阻指数最低。 进行标准化处理,可求得 J ∗ [ yA(x) ] = 0.903、J ∗ [ yB(x) ] = 0.992、J ∗ [ yC(x) ] = 0.996 K ∗ [ yA(x) ] = 0.231、K ∗ [ yB(x) ] = 0.713、K ∗ [ yC(x) ] = 0.501 最后进行综合评判。以驾驶稳定型驾驶员为 例,设驾驶员对于 J*、K*指标所取权重为 w1=0.3、 w2=0.7,代入计算可得 C ∗ [ yA(x) ] = 0.433、C ∗ [ yB(x) ] = 0.797、C ∗ [ yC(x) ] = 0.649 考虑权重的变化,对于驾驶稳定型驾驶员而 言,只需保证弯阻指数所占的权重大于长度指数 所占权重。因此,若取 J*、K*指标所取权重为 w1=0.4、w2=0.6,可求得 C ∗ [ yA(x) ] = 0.499、C ∗ [ yB(x) ] = 0.824、C ∗ [ yC(x) ] = 0.699 若取 J*、K*指标所取权重为 w1=0.45、w2=0.55, 可求得 C ∗ [ yA(x) ] = 0.533、C ∗ [ yB(x) ] = 0.838、C ∗ [ yC(x) ] = 0.723 C ∗ [ yA(x) ] < C ∗ [ yC(x) ] < C ∗ [ yB(x) ] 对上述结果进行整理,可发现虽然权系数的取 值发生了改变,不等式 始终成立。因此应用本文方法所求出的插值曲 线 B 为这 3 条曲线中的最优轨迹曲线。在后续控 制中可以选取本文给出的构造 B 曲线的方法作为 一种满意控制的方法。从上述过程可知。本文的 评判模型对于智能车轨迹曲线的选取提供了一种 方法。 如图 7 所示,为本文的轨迹曲线在道路上的 仿真图。本文从邻域系统入手,重点搜索标准可 行邻域内的满意路径。在现有的邻域系统相关文 献中,很少有文献从控制轨迹的平稳光滑角度去 搜寻满意控制规则,忽略了控制轨迹的顺畅度和 效率。下图为文献 [10]−[11] 的控制仿真图,同本 文仿真图对比可以看出,本文的控制理论在轨迹 的平稳光滑性上具有一定的优越性。 60 50 40 30 20 10 0 −10 −20 0 20 40 60 80 100 y/m x/m 图 7 道路仿真图 Fig. 7 Road simulation (a) 文献[10]的仿真图 30 20 10 y/m x/m x/m y/m 0 −10 −20 −30−20−10 0 10 20 30 (b) 本文的仿真对比图 40 30 20 10 0 −10 0 10 20 30 40 50 60 图 8 文献 [10] 与本文仿真图对比 Fig. 8 Comparison of the literature [10] with the simulation of this paper (a) 文献[11]的仿真图 200 160 120 80 40 0 5 10 15 y/m y/m x/m x/m 20 25 30 (b) 本文的仿真对比图 75 85 65 55 45 35 60 70 80 90 100110 图 9 文献 [11] 与本文仿真图对比 Fig. 9 Comparison of the literature [11] with the simulation of this paper 5 结束语 对于微观的道路上的最优轨迹的规划问题, 邻域系统理论可以将复杂动态过程转化为简单 静态过程,简化了问题的复杂性。本文定义了曲 线的弯阻指数和长度指数,并以此为基础给出了 邻域内最优轨迹的综合评判求解模型,给出了一 种满意的轨迹曲线算法。仿真结果说明了本文 的规划理论在轨迹的平稳光滑性上具有一定的 优越性。 参考文献: ZHANG Kailong, YANG Ansheng, SU Hang, et al. Unified modeling and design of reservation-based cooperation mechanisms for intelligent vehicles[C]//Proceedings of the IEEE 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil, 2016: 1192– 1199. [1] ZHANG Kailong, ZHANG Dafang, DE LA FORTELLE A, et al. State-driven priority scheduling mechanisms for driverless vehicles approaching intersections[J]. IEEE transactions on intelligent transportation systems, 2015, 16(5): 2487–2500. [2] ZHANG Ronghui, YOU Feng, CHEN Fang, et al. Vehicle detection method for intelligent vehicle at night time based on video and laser information[J]. International journal of [3] ·1046· 智 能 系 统 学 报 第 14 卷