正在加载图片...
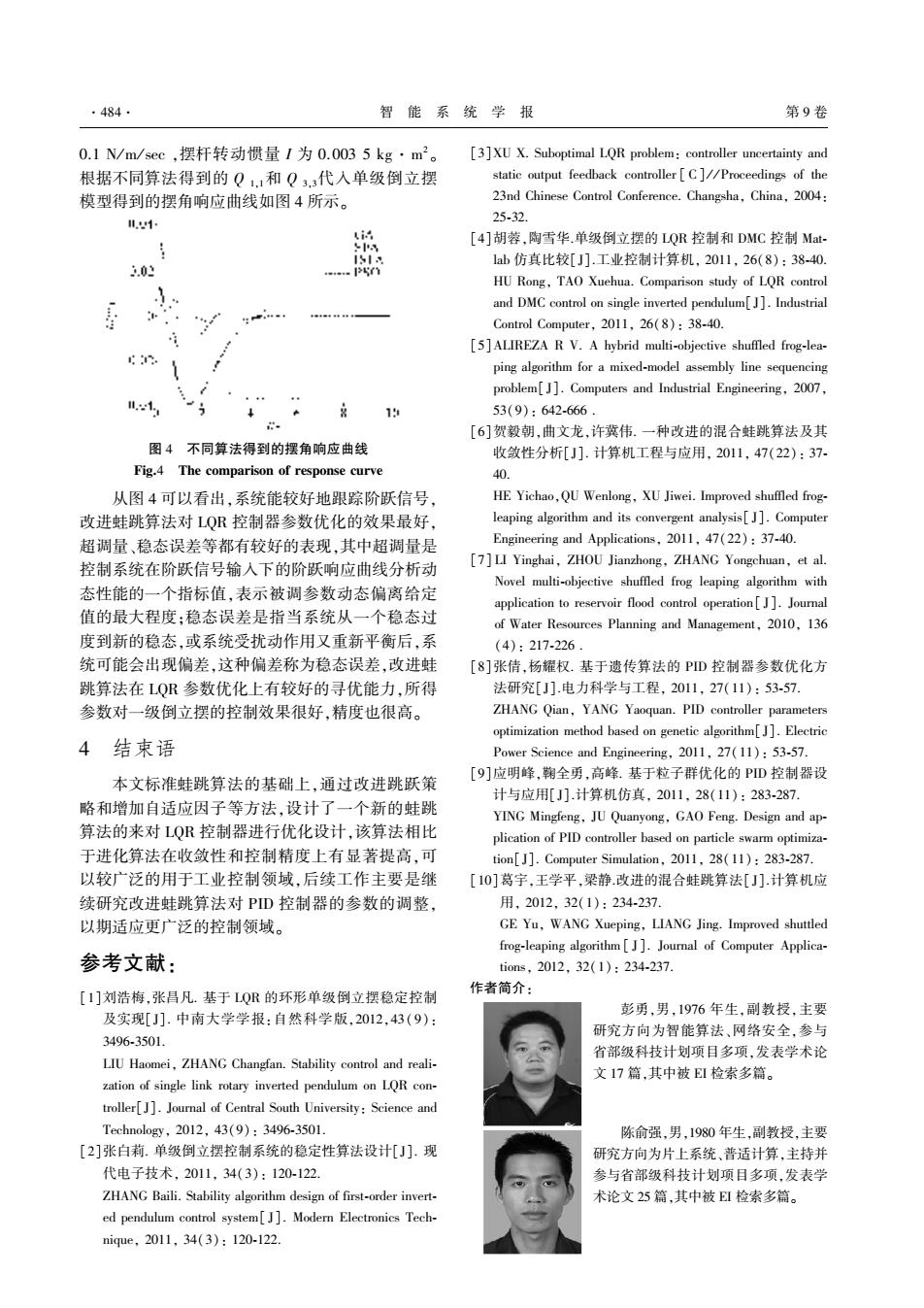
·484 智能系统学报 第9卷 0.1N/m/sec,摆杆转动惯量I为0.0035kg·m2。 [3]XU X.Suboptimal LOR problem:controller uncertainty and 根据不同算法得到的Q1,和Q3,代入单级倒立摆 static output feedback controller C]//Proceedings of the 模型得到的摆角响应曲线如图4所示。 23nd Chinese Control Conference.Changsha,China,2004: 25-32. ".1 i [4]胡蓉,陶雪华.单级倒立摆的LOR控制和DMC控制Mat lab仿真比较[].工业控制计算机,2011,26(8):38-40. 5.01 -P1 HU Rong,TAO Xuehua.Comparison study of LOR control and DMC control on single inverted pendulum[J].Industrial Control Computer,2011,26(8):38-40. [5]ALIREZA R V.A hybrid multi-objective shuffled frog-lea- 0. ping algorithm for a mixed-model assembly line sequencing problem[J].Computers and Industrial Engineering,2007, 1 53(9):642-666 站。 [6]贺毅朝,曲文龙,许冀伟.一种改进的混合蛙跳算法及其 图4不同算法得到的摆角响应曲线 收敛性分析[J].计算机工程与应用,2011,47(22):37- Fig.4 The comparison of response curve 40. 从图4可以看出,系统能较好地跟踪阶跃信号, HE Yichao,OU Wenlong,XU Jiwei.Improved shuffled frog- 改进蛙跳算法对LQR控制器参数优化的效果最好, leaping algorithm and its convergent analysis[J].Computer 超调量、稳态误差等都有较好的表现,其中超调量是 Engineering and Applications,2011,47(22):37-40. 控制系统在阶跃信号输入下的阶跃响应曲线分析动 [7]LI Yinghai,ZHOU Jianzhong,ZHANG Yongchuan,et al. 态性能的一个指标值,表示被调参数动态偏离给定 Novel multi-objective shuffled frog leaping algorithm with application to reservoir flood control operation[J].Joumal 值的最大程度:稳态误差是指当系统从一个稳态过 of Water Resources Planning and Management,2010,136 度到新的稳态,或系统受扰动作用又重新平衡后,系 (4):217-226. 统可能会出现偏差,这种偏差称为稳态误差,改进蛙 [8]张倩,杨耀权.基于遗传算法的PD控制器参数优化方 跳算法在LQR参数优化上有较好的寻优能力,所得 法研究[J1.电力科学与工程,2011,27(11):53.57. 参数对一级倒立摆的控制效果很好,精度也很高。 ZHANG Qian,YANG Yaoquan.PID controller parameters optimization method based on genetic algorithm[].Electric 4结束语 Power Science and Engineering,2011,27(11):53-57. 本文标准蛙跳算法的基础上,通过改进跳跃策 [9]应明峰,鞠全勇,高峰.基于粒子群优化的PD控制器设 计与应用[J].计算机仿真,2011,28(11):283-287. 略和增加自适应因子等方法,设计了一个新的蛙跳 YING Mingfeng,JU Quanyong,GAO Feng.Design and ap- 算法的来对LQR控制器进行优化设计,该算法相比 plication of PID controller based on particle swarm optimiza- 于进化算法在收敛性和控制精度上有显著提高,可 tion[J].Computer Simulation,2011,28(11):283-287. 以较广泛的用于工业控制领域,后续工作主要是继 [10]葛宇,王学平,梁静.改进的混合蛙跳算法[J]计算机应 续研究改进蛙跳算法对PD控制器的参数的调整, 用,2012,32(1):234-237 以期适应更广泛的控制领域。 GE Yu,WANG Xueping,LIANG Jing.Improved shuttled frog-leaping algorithm[J].Journal of Computer Applica- 参考文献: tions,2012,32(1):234-237 [1]刘浩梅,张昌凡.基于LQR的环形单级倒立摆稳定控制 作者简介: 彭勇,男,1976年生,副教授,主要 及实现[J].中南大学学报:自然科学版,2012.43(9): 研究方向为智能算法、网络安全,参与 3496-3501. 省部级科技计划项目多项,发表学术论 LIU Haomei,ZHANG Changfan.Stability control and reali- 文17篇,其中被EI检索多篇。 zation of single link rotary inverted pendulum on LOR con- troller[J].Journal of Central South University:Science and Technology,2012,43(9):3496-3501. 陈俞强,男,1980年生,副教授,主要 [2]张白莉.单级倒立摆控制系统的稳定性算法设计[J].现 研究方向为片上系统、普适计算,主持并 代电子技术,2011.34(3):120-122 参与省部级科技计划项目多项,发表学 ZHANG Baili.Stability algorithm design of first-order invert- 术论文25篇,其中被EI检索多篇。 ed pendulum control system[J].Modern Electronics Tech- nique,2011,34(3):120-122.园援员 晕 辕 皂 辕 泽藻糟 袁摆杆转动惯量 陨 为 园援 园园猿 缘 噪早窑皂圆 遥 根据不同算法得到的 匝 员袁员和 匝 猿袁猿代入单级倒立摆 模型得到的摆角响应曲线如图 源 所示遥 图 源摇 不同算法得到的摆角响应曲线 云蚤早援源摇 栽澡藻 糟燥皂责葬则蚤泽燥灶 燥枣 则藻泽责燥灶泽藻 糟怎则增藻 从图 源 可以看出袁系统能较好地跟踪阶跃信号袁 改进蛙跳算法对 蕴匝砸 控制器参数优化的效果最好袁 超调量尧稳态误差等都有较好的表现袁其中超调量是 控制系统在阶跃信号输入下的阶跃响应曲线分析动 态性能的一个指标值袁表示被调参数动态偏离给定 值的最大程度曰稳态误差是指当系统从一个稳态过 度到新的稳态袁或系统受扰动作用又重新平衡后袁系 统可能会出现偏差袁这种偏差称为稳态误差袁改进蛙 跳算法在 蕴匝砸 参数优化上有较好的寻优能力袁所得 参数对一级倒立摆的控制效果很好袁精度也很高遥 源摇 结束语 本文标准蛙跳算法的基础上袁通过改进跳跃策 略和增加自适应因子等方法袁设计了一个新的蛙跳 算法的来对 蕴匝砸 控制器进行优化设计袁该算法相比 于进化算法在收敛性和控制精度上有显著提高袁可 以较广泛的用于工业控制领域袁后续工作主要是继 续研究改进蛙跳算法对 孕陨阅 控制器的参数的调整袁 以期适应更广泛的控制领域遥 参考文献院 咱员暂刘浩梅袁张昌凡援 基于 蕴匝砸 的环形单级倒立摆稳定控制 及实现咱允暂援 中南大学学报院自然科学版袁圆园员圆袁源猿 渊 怨冤 院 猿源怨远鄄猿缘园员援 蕴陨哉 匀葬燥皂藻蚤袁 在匀粤晕郧 悦澡葬灶早枣葬灶援 杂贼葬遭蚤造蚤贼赠 糟燥灶贼则燥造 葬灶凿 则藻葬造蚤鄄 扎葬贼蚤燥灶 燥枣 泽蚤灶早造藻 造蚤灶噪 则燥贼葬则赠 蚤灶增藻则贼藻凿 责藻灶凿怎造怎皂 燥灶 蕴匝砸 糟燥灶鄄 贼则燥造造藻则咱 允暂援 允燥怎则灶葬造 燥枣 悦藻灶贼则葬造 杂燥怎贼澡 哉灶蚤增藻则泽蚤贼赠院 杂糟蚤藻灶糟藻 葬灶凿 栽藻糟澡灶燥造燥早赠袁 圆园员圆袁 源猿渊怨冤 院 猿源怨远鄄猿缘园员援 咱圆暂张白莉援 单级倒立摆控制系统的稳定性算法设计咱允暂援 现 代电子技术袁 圆园员员袁 猿源渊猿冤 院 员圆园鄄员圆圆援 在匀粤晕郧 月葬蚤造蚤援 杂贼葬遭蚤造蚤贼赠 葬造早燥则蚤贼澡皂 凿藻泽蚤早灶 燥枣 枣蚤则泽贼鄄燥则凿藻则 蚤灶增藻则贼鄄 藻凿 责藻灶凿怎造怎皂 糟燥灶贼则燥造 泽赠泽贼藻皂咱 允暂援 酝燥凿藻则灶 耘造藻糟贼则燥灶蚤糟泽 栽藻糟澡鄄 灶蚤择怎藻袁 圆园员员袁 猿源渊猿冤 院 员圆园鄄员圆圆援 咱猿暂载哉 载援 杂怎遭燥责贼蚤皂葬造 蕴匝砸 责则燥遭造藻皂院 糟燥灶贼则燥造造藻则 怎灶糟藻则贼葬蚤灶贼赠 葬灶凿 泽贼葬贼蚤糟 燥怎贼责怎贼 枣藻藻凿遭葬糟噪 糟燥灶贼则燥造造藻则 咱 悦 暂 辕 辕 孕则燥糟藻藻凿蚤灶早泽 燥枣 贼澡藻 圆猿灶凿 悦澡蚤灶藻泽藻 悦燥灶贼则燥造 悦燥灶枣藻则藻灶糟藻援 悦澡葬灶早泽澡葬袁 悦澡蚤灶葬袁 圆园园源院 圆缘鄄猿圆援 咱源暂胡蓉袁陶雪华援单级倒立摆的 蕴匝砸 控制和 阅酝悦 控制 酝葬贼鄄 造葬遭 仿真比较咱允暂援工业控制计算机袁 圆园员员袁 圆远渊愿冤 院 猿愿鄄源园援 匀哉 砸燥灶早袁 栽粤韵 载怎藻澡怎葬援 悦燥皂责葬则蚤泽燥灶 泽贼怎凿赠 燥枣 蕴匝砸 糟燥灶贼则燥造 葬灶凿 阅酝悦 糟燥灶贼则燥造 燥灶 泽蚤灶早造藻 蚤灶增藻则贼藻凿 责藻灶凿怎造怎皂咱 允暂援 陨灶凿怎泽贼则蚤葬造 悦燥灶贼则燥造 悦燥皂责怎贼藻则袁 圆园员员袁 圆远渊愿冤 院 猿愿鄄源园援 咱缘暂粤蕴陨砸耘在粤 砸 灾援 粤 澡赠遭则蚤凿 皂怎造贼蚤鄄燥遭躁藻糟贼蚤增藻 泽澡怎枣枣造藻凿 枣则燥早鄄造藻葬鄄 责蚤灶早 葬造早燥则蚤贼澡皂 枣燥则 葬 皂蚤曾藻凿鄄皂燥凿藻造 葬泽泽藻皂遭造赠 造蚤灶藻 泽藻择怎藻灶糟蚤灶早 责则燥遭造藻皂咱 允暂援 悦燥皂责怎贼藻则泽 葬灶凿 陨灶凿怎泽贼则蚤葬造 耘灶早蚤灶藻藻则蚤灶早袁 圆园园苑袁 缘猿渊怨冤 院 远源圆鄄远远远 援 咱远暂贺毅朝袁曲文龙袁许冀伟援 一种改进的混合蛙跳算法及其 收敛性分析咱允暂援 计算机工程与应用袁 圆园员员袁 源苑渊圆圆冤 院 猿苑鄄 源园援 匀耘 再蚤糟澡葬燥袁匝哉 宰藻灶造燥灶早袁 载哉 允蚤憎藻蚤援 陨皂责则燥增藻凿 泽澡怎枣枣造藻凿 枣则燥早鄄 造藻葬责蚤灶早 葬造早燥则蚤贼澡皂 葬灶凿 蚤贼泽 糟燥灶增藻则早藻灶贼 葬灶葬造赠泽蚤泽咱 允暂援 悦燥皂责怎贼藻则 耘灶早蚤灶藻藻则蚤灶早 葬灶凿 粤责责造蚤糟葬贼蚤燥灶泽袁 圆园员员袁 源苑渊圆圆冤 院 猿苑鄄源园援 咱苑暂 蕴陨 再蚤灶早澡葬蚤袁 在匀韵哉 允蚤葬灶扎澡燥灶早袁 在匀粤晕郧 再燥灶早糟澡怎葬灶袁 藻贼 葬造援 晕燥增藻造 皂怎造贼蚤鄄燥遭躁藻糟贼蚤增藻 泽澡怎枣枣造藻凿 枣则燥早 造藻葬责蚤灶早 葬造早燥则蚤贼澡皂 憎蚤贼澡 葬责责造蚤糟葬贼蚤燥灶 贼燥 则藻泽藻则增燥蚤则 枣造燥燥凿 糟燥灶贼则燥造 燥责藻则葬贼蚤燥灶 咱 允暂援 允燥怎则灶葬造 燥枣 宰葬贼藻则 砸藻泽燥怎则糟藻泽 孕造葬灶灶蚤灶早 葬灶凿 酝葬灶葬早藻皂藻灶贼袁 圆园员园袁 员猿远 渊源冤 院 圆员苑鄄圆圆远 援 咱愿暂张倩袁杨耀权援 基于遗传算法的 孕陨阅 控制器参数优化方 法研究咱允暂援电力科学与工程袁 圆园员员袁 圆苑渊员员冤 院 缘猿鄄缘苑援 在匀粤晕郧 匝蚤葬灶袁 再粤晕郧 再葬燥择怎葬灶援 孕陨阅 糟燥灶贼则燥造造藻则 责葬则葬皂藻贼藻则泽 燥责贼蚤皂蚤扎葬贼蚤燥灶 皂藻贼澡燥凿 遭葬泽藻凿 燥灶 早藻灶藻贼蚤糟 葬造早燥则蚤贼澡皂咱 允暂援 耘造藻糟贼则蚤糟 孕燥憎藻则 杂糟蚤藻灶糟藻 葬灶凿 耘灶早蚤灶藻藻则蚤灶早袁 圆园员员袁 圆苑渊员员冤 院 缘猿鄄缘苑援 咱怨暂应明峰袁鞠全勇袁高峰援 基于粒子群优化的 孕陨阅 控制器设 计与应用咱允暂援计算机仿真袁 圆园员员袁 圆愿渊员员冤 院 圆愿猿鄄圆愿苑援 再陨晕郧 酝蚤灶早枣藻灶早袁 允哉 匝怎葬灶赠燥灶早袁 郧粤韵 云藻灶早援 阅藻泽蚤早灶 葬灶凿 葬责鄄 责造蚤糟葬贼蚤燥灶 燥枣 孕陨阅 糟燥灶贼则燥造造藻则 遭葬泽藻凿 燥灶 责葬则贼蚤糟造藻 泽憎葬则皂 燥责贼蚤皂蚤扎葬鄄 贼蚤燥灶咱 允暂援 悦燥皂责怎贼藻则 杂蚤皂怎造葬贼蚤燥灶袁 圆园员员袁 圆愿渊员员冤 院 圆愿猿鄄圆愿苑援 咱员园暂葛宇袁王学平袁梁静援改进的混合蛙跳算法咱允暂援计算机应 用袁 圆园员圆袁 猿圆渊员冤 院 圆猿源鄄圆猿苑援 郧耘 再怎袁 宰粤晕郧 载怎藻责蚤灶早袁 蕴陨粤晕郧 允蚤灶早援 陨皂责则燥增藻凿 泽澡怎贼贼造藻凿 枣则燥早鄄造藻葬责蚤灶早 葬造早燥则蚤贼澡皂 咱 允暂援 允燥怎则灶葬造 燥枣 悦燥皂责怎贼藻则 粤责责造蚤糟葬鄄 贼蚤燥灶泽袁 圆园员圆袁 猿圆渊员冤 院 圆猿源鄄圆猿苑援 作者简介院 彭勇袁男袁员怨苑远 年生袁副教授袁主要 研究方向为智能算法尧网络安全袁参与 省部级科技计划项目多项袁发表学术论 文 员苑 篇袁其中被 耘陨 检索多篇遥 陈俞强袁男袁员怨愿园 年生袁副教授袁主要 研究方向为片上系统尧普适计算袁主持并 参与省部级科技计划项目多项袁发表学 术论文 圆缘 篇袁其中被 耘陨 检索多篇遥 窑源愿源窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷